



توضیحات
کدنویسی و کنترل پیش بین برای سیستم های غیر خطی و متغیر با زمان با نرم افزار متلب
مقدمه:
در این مقاله قصدا داریم به بررسی یکی از انواع روش های کنترل پیش بین برای سیستم های غیر خطی و متغیر با زمان بپردازیم. که این روش از تلفیق روش های موجود در کنترل پیش بین با سایر روش های کنترلی که به موازات کنترل پیش در زمینه کنترل رشد و توسعه یافته است. هر ساله در زمینه کنترل پیش بین، سعی بر آن شده است که این روش را برای گستره سیستم های مختلف ارتقاد دهند. به همین منظور روش های غیرخطی NMPC، مقاوم RMPC، تطبیقی AMPC و … به وجود آمده است.
این روش های کنترلی معمولا برای سیستم هایی که غیرخطی گری یا عدم قطعیت هایی در خود دارند قابل استفاده است. یکی از سیستم هایی که غیرخطی گری شدید در رفتار خود دارد، کوادراتورها می باشند. کوادراتور با 6 درجه آزادی در خود و داشتن روابط غیر خطی شدید همواره یک مسئله کنترلی بسیار مهم در زمینه کنترل بوده است و معمولا برای این سیستم سعی شده است که با تلفیق و ارتقای روش های مختلف یک کنترل کننده مناسب طراحی و پیاده سازی شود.
در انجام این پروژه متلب روش کنترل پیش بین تطبیقی Adaptive Model Predictive Control برای کنترل ارتفاع کوادراتور استفاده شده است.
روش کنترل پیش بین تطبیقی
برای سیستم های غیر خطی که در طول زمان کنترل تغییرات شدید در خود دارند، باید از کنترل کننده هایی استفاده کرد که به صورت آنلاین و با توجه وضعیت فعلی سیستم قابلیت tunning کنترل کننده را داشته باشد.کنترل کننده های پیش بین ارتقاء یافته مانند EDMC یک روش کنترلی می باشد که در هر مرحله از زمان شبیه سازی مدل خطی سیستم را حول وضعیت فعلی محاسبه نموده و با توجه به آن مدل و روش Fixed Point تقریبی مناسب از غیرخطی گری های سیستم در زمان آینده نیز بدست می آورد، و سپس با این مدل خطی و غیرخطی گری های سیستم به بازطراحی قانون کنترلی می پردازد و سیستم را کنترل می کند. البته این روش فقط در مورد سیستم های غیرخطی که مدل غیرخطی آن ها به صورت کامل در دسترس است قابلیت استفاده دارند و اگر سیستم دارای عدم قطعیت یا قسمت هایی با دینامیک نامشخص و یا حتی تغییرات احتمالی داشته باشد، قابل استفاده است. دیگر روشی که برای این منظور استفاده می شود روش های کنترل مقاوم یا RMPC می باشند، که قابلیت مقاومت در مقابل عدم قطعیت های سیستم غیر خطی را در خود دارا می باشد ولی هزینه زمانی برای بهینه سازی و همچنین محدودیت ها این روش برای عدم قطعیت ها و همچنین افت عملکرد سیستم کنترل کننده از مهمترین مشکلات این روش می باشد.
لذا محققین در زمینه کنترل پیش بین، سعی بر آن داشتند که با تلفیقی از روش کنترل تطبیقی و کنترل پیش بین از مزایای های دو روش برای کنترل آنلاین سیستم به همراه tunning آنلاین کنترل کننده استفاده نمایند. به این منظور از روش کنترل پیش بین تطبیقی رو نمایی کردند. در این روش با استفاده از روش های تخمین و شناسایی سیستم مقدار پارامترهای سیستم را در هر لحظه با اعمال ضریب فراموشی در سیستم تخمین زده و با توجه مقادیر فعلی پارامترها یک کنترل کننده پیش بین برای سیستم به روش DMC طراحی می شود. این روش قابلیت تبدیل غیرخطی به یک مدل خطی در هر لحظه را دارند.
تلفیق این دو روش کنترلی به منظور بهره بردن از مزایای آنها بوده است. لذا در زیر به ذکر چند مورد از مزایای این روش ها می پردازیم:
- تبدیل مورد غیر خطی به خطی و ساده سازی طراحی کنترل کننده
- قابلیت طراحی کنترل کننده بهینه در هر گام زمانی
- قابلیت مقابله با غیرخطی گری های سیستم
- قابلیت شناسایی عدم قطعیت های سیستم و طراحی کنترل کننده مناسب برای مقابله با آنها
- قابلیت طراحی کنترل کننده مقید
- مقاومت در مقابل اغتشاشات خارجی
- کم کردن حجم محاسبات سیستم با استفاده از روش DMC
- و …
به دلیل مزایای فوق این روش کنترلی امروزه بسیار مورد توج است و با توجه به اینکه قدری اثبات پایداری این سیستم ها دشوار می باشد، بیشتر تحقیقات در این زمینه به شبیه سازی منتج شده اند و در سیستم های پیچیده مانند هواپیما و فضاپیماها همچنان کاربرد زیادی ندارد. هر چند به نظر می رسد که در این زمینه با توجه به گسترش روز افزون آن در آینده ای نزدیک قابلیت های بیشتری برای ارائه در سیستم های واقعی را داشته باشد.
بررسی مقاله شبیه سازی شده
مقاله انتخابی تحت عنوان Adaptive Model Predictive Control of a Quadrotor می باشد. در این مقاله همانطور در بالا توضیح داده شده به بررسی کارآیی کنترل کننده پیش بین تطبیقی برای کنترل کوادراتور پرداخته شده است. لذا ابتدا مدل غیرخطی کوادراتور بررسی شده است، و در ادامه سعی شده است که با استفاده از شناسایی در یک نقطه کار خاص یک سیستم خطی از آن به روش حداقل مربعات تکراری Recursive Least Square یک مدل خطی از سیتستم بدست آورد. لازم به ذکر است که سیستم وفوق فقط برای کنترل ارتفاع کوادراتور مورد بررسی قرار گرفته است. سپس مبتنی برای این مدل یک کنترل کننده DMC برای سیستم طراحی شده است و سعی در کنترل کردن سیستم داشته است.
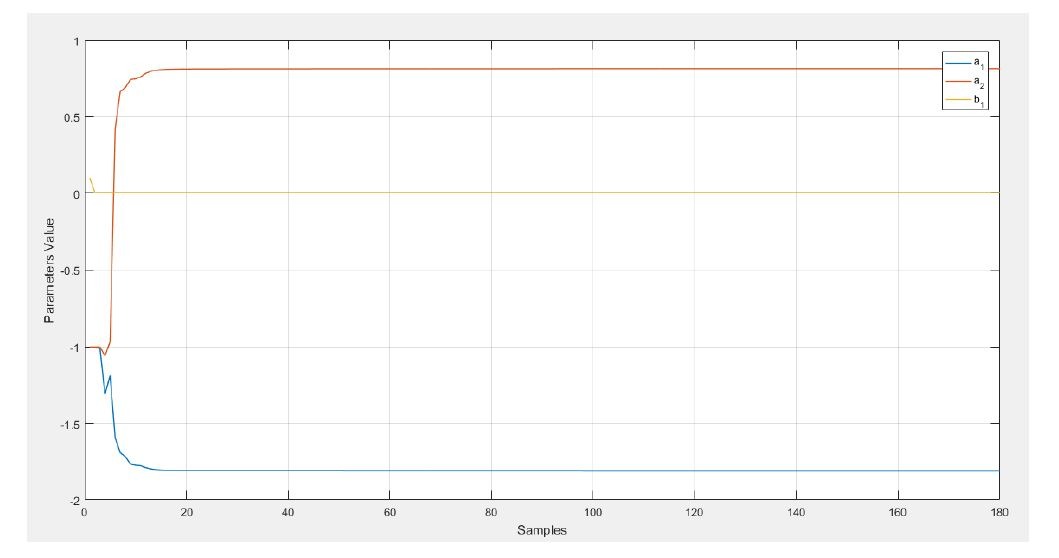
در ادامه نیز کنترل کننده تطبیقی پیش بین، نیز طراحی شده است. در این روش ابتدا یک مدل تقریبی از سیستم که با توجه به شناخت کلی ما از سیستم می باشد، در نظر گرفته می شود و در ادامه با RLS در هر گام زمانی به بازسازی پارامترهای سیستم می پردازد همانطور که در ادامه نیز نشان داده شده است، این روش قابلیت این را دارد که بعد از مدتی در کنار کنترل سیستم، مدل واقعی سیستم را شناسایی نماید.
برای این منظور که شناسایی مبتنی بر مدل فعلی سیستم باشد، از ضریب فراموش استفاده شده است. این کار باعث می شود که روش RLS قابلیت بهتری برای شناسایی تغییرات پارامتر در خود داشته باشد. همچنین در مقاله تاثیر برخی از مقادیری که در tuning کنترل کننده ADMC تاثیر دارند نیز بررسی شده اند مانند مقدار اولیه ماتریس کواریانس خطا.
بعد از هر مرحله شناسایی با تجه به مقادیر شناسایی شده برای سیستم، کنترل کننده DMC بازطراحی می شود و قانون کنترلی آن سیستم دوبار طراحی می شود.
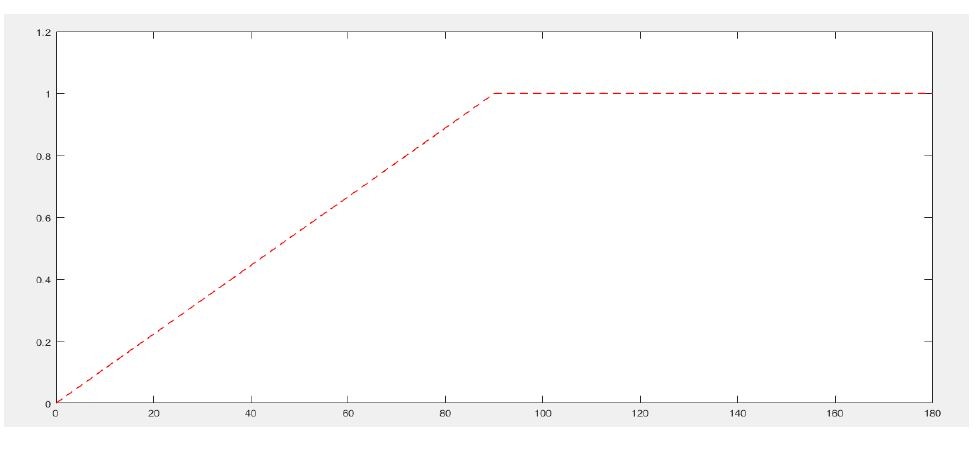
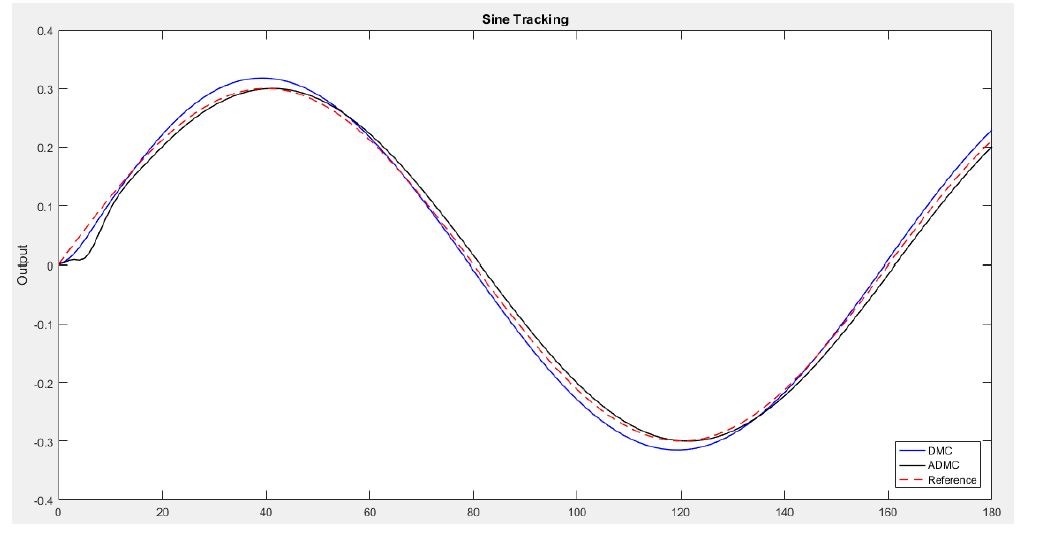
در ادامه سعی شده در نشان دادن قابلیت های این نوع کنترل کننده یک بررسی بین روش DMC و ADMC در قدرت تعیقب مسیر مرجع و مسیر مرجع سینوسی انجام شده است.
این شبیه سازی به همراه شناسایی سیستم و روند تقریب پارامترها در متلب انجام شده است و در زیر آورده شده است.
مدل غیر خطی سیستم به صورت زیر می باشد….
کدنویسی و کنترل پیش بین برای سیستم های غیر خطی و متغیر با زمان با نرم افزار متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.