


توضیحات
شبیه سازی مقاله کنترل پیش بین برای سیستم های تاخیردار با متلب
چکیده مقاله مرجع:
این مقاله شبیه سازی شده به بررسی مسئله کنترل پیش بینی مدل برای یک کلاس از سیستم های کنترل شبکه می پردازد. هر دو تاخیر سنسور به کنترل کننده و کنترل کننده به عملگر در زنجیره مارکوویچ مورد توجه و توصیف قرار می گیرند. سیستم های حلقه بسته تولید شده به عنوان سیستم های خطی پرش با دو حالت نوشته می شوند. طرح کنترل به عنوان یک مشکل بهینه سازی وابسته به تاخیر وابسته به هزینه بدنه بدترین حد در یک افق بی نهایت در هر لحظه نمونه گیری مشخص می شود. یک روش نابرابری ماتریس خطی برای سنتز کنترل کننده توسعه یافته است. نشان داده شده است که کنترل کننده پیش بين حالت بازخورد حالت پیشنهادی، پاداری تصادفی سیستم حلقه بسته را تضمین می کند.
مقدمه:
مسئله در تاخیر در فرآیند موجود در طبیعت و سیستم های ساخته شده توسط انسان همواره یکی از عواملی بوده که باعث به وجود آمدن خطا در محاسبات کنترلی در کنترل کننده ها می شود. به طور کلی می توان تاخیرهای موجود در سیستم را در دو حالت تقسیم بندی کرد: 1. تاخیر در اندازه گیری خروجی سیستم، 2. تاخیر در اعمال ورودی به سیستم. این دو تاخیر می توانند باعث ناپایداری سیستم های حلقه بسته شوند. چرا که اساسا در حالت تاخیر در سیستم مقادیر داده های اندازه گیری شده در سیستم عملا با مقادیر فعلی متفاوت بوده و مربوط به مقادیر قبلی سیستم می باشند، و همچنین در تاخیر در اعمال ورودی نیز باعث می شود که خروجی قبلی کنترل کننده که مناسب برای وضعیت قبلی سیستم بوده است به سیستم اعمال شود و چون با توجه به وضعیت فعلی سیستم نبوده است می تواند باعث افت کارآیی سیستم شود.
کنترل کننده های پیش بین چون در هر مرحله محاسبات بهینه را با توجه به وضعیت فعلی سیستم انجام می دهند، عملا قابلیت تطبیقی مناسبی برای کارآیی در هر وضعیتی از جمله سیستم های تاخیردار را دارا می باشد. اما باید در نظر داشت که بعضا به خاطر متغیر با زمان بودن سیستم در طول زمان خصوصیات سیستم تغییر می کند، لذا یکی از خصوصیات از جمله تاخیر سیستم نیز می تواند در طول فرآیند کنترلی تغییر یابد. لذا در سیستم هایی این تغییرات را به صورت اختمالی تقسیم بندی می نمایند و در این مقاله بدنبال این هستیم تا با طراحی یک کنترل کننده پیش بین مقاوم در مقابل سیستم های تاخیردار احتمالی طراحی کنیم و از مقاومت مناسبی نیز برخوردار باشد.
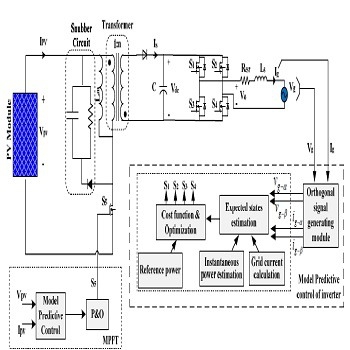
روابط حاکم بر سیستم های تاخیر دار:
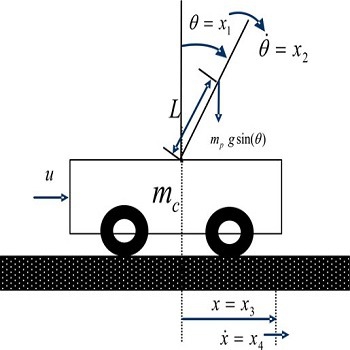
شماتیک سیستم های تاخیردار به صورت زیر می باشد.
در سیستم در حالت کلی رابطه حاکم بر سیستم به صورت مقابل می باشد:
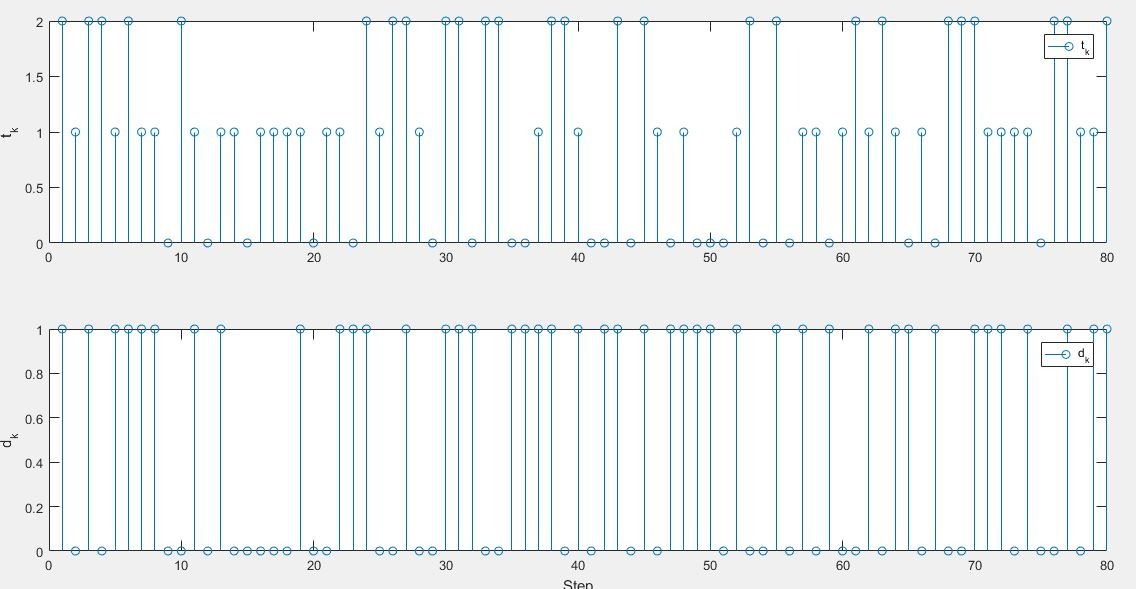
که در صورتی که مقدار میزان تاخیر در اندازه گیری و میزان تاخیر در اعمال سیگنال کنترلی کنترل کننده به سیستم را نشان می دهند. لذا چنانچه خروجی کنترل کننده را با نشان دهیم، سیگنال کنترلی اعمالی به سیستم به صورت زیر می باشد:
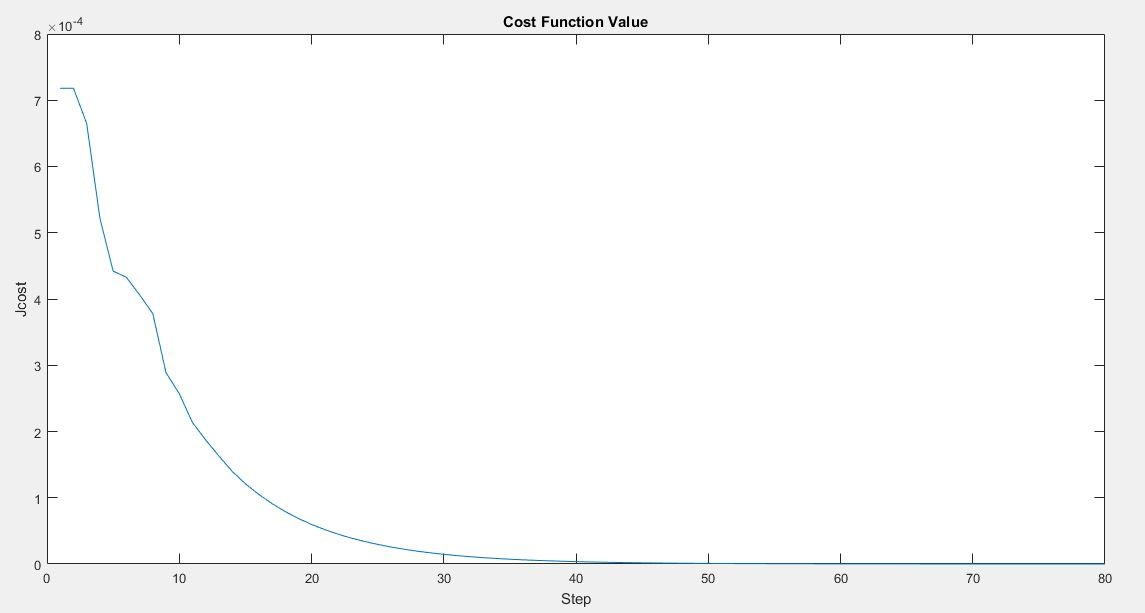

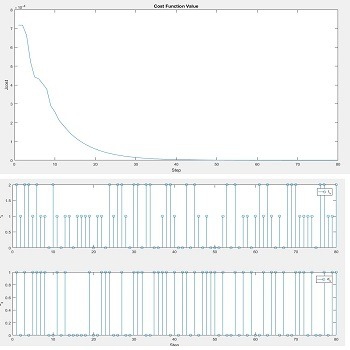
پیاده سازی قسمتی از مقاله به دلیل ناقص بودن اطلاعات داخل مقاله با مشکل همراه است، مشکل اصلی عدم معرفی ماتریس های Z و S و W و X1 و X2 و .. بودش به همراه افق پیش بینی و افق کنترل بوده لذا مجبور شدیم از فورم اولیه تابع هزینه که در 17 گفته شده استفاده کنیم و برای بهینه سازی هم از بهینه ساز YALMIP که یه افزونه برای متلب هستش استفاده کنیم. یه سری از مقادیری که توی مقاله مشخص نشده بود رو عملا مجبور شدیم که خودمان انتخاب کنیم و چند باری تغییر دادیم که نتایج نسبتا نزدیک به خروجی مقاله بشه.
شبیه سازی مقاله کنترل پیش بین برای سیستم های تاخیردار با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.