توضیحات
شبیه سازی مقاله کنترلر اضطراری برای کوادروتور UAVs با متلب
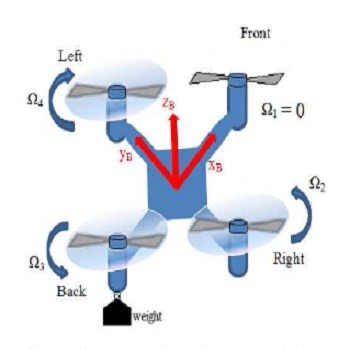
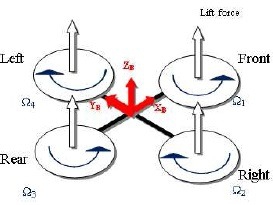
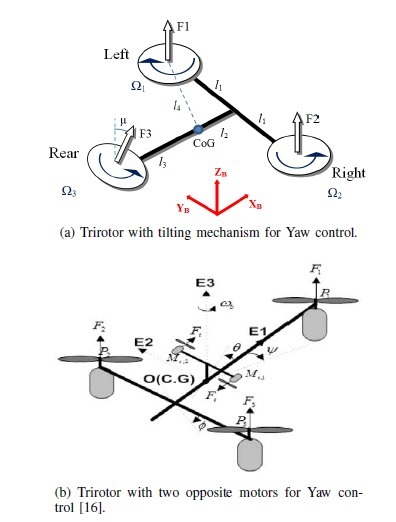
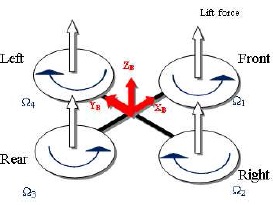
در این مقاله یک کنترلر اضطراری برای Quadrotor AscTec Pelican توسعه داده شده است که در یکی از موتورها یا روتورها از یک شکست شدید رنج می برد. با وجود یکی از موتورهای به شدت آسیب دیده،کنترل quadrotor با استفاده از استراتژی کنترل قدیمی و یا تکنیکهای کنترل تحمل گسل معمولی غیر ممکن است. کنترل کننده اضطراری طراحی شده در این مقاله، هر خطایی یا خطا در موتورهای UAV quadrotor را به طور آنلاین شناسایی می کند و هرگاه یک خطای شدید (که کنترل کننده حالت کشویی غیرفعال منفعل از چهارگوش نتواند نگه داشته شود) کنترل کننده تعدادی از تغییرات وزن را اعمال می کند بنابراین سه موتورهای باقی مانده برای کنترل UAV به عنوان tritrotor مورد استفاده قرار می گیرند. کنترل کننده از یک ناظر حالت کشویی غیر خطی به عنوان واحد تشخیص و شناسایی خطا (FDI) برای شناسایی و برآورد میزان خطای آنلاین استفاده می کند. نتایج SIMULINK نشان می دهد که کنترل پیشنهادی در تشخیص خطا سریع است و موفق به کنترل کوادروتور آسیب دیده تا زمانی که مسیر خود را به اتمام برساند.
شبیه سازی مقاله کنترلر اضطراری برای کوادروتور UAVs با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.








نقد و بررسیها
هنوز بررسیای ثبت نشده است.