


توضیحات
پروژه بررسی و طراحی مکانیزم یوغ اسکاچ با رابط بادامکی در متلب
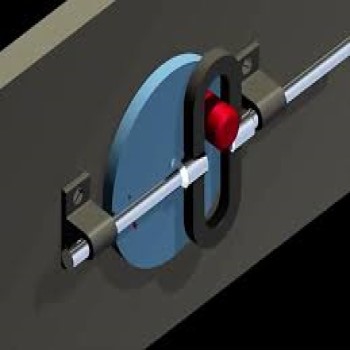
این مکانیزم یکی از مکانیزم های مولد حرکت هارمونیک ساده است. کاربرد قدیمی این مکانیزم در پمپ های بخار بوده ولی امروزه از آن برای ایجاد ارتعاشات در ماشین های آزمایش استفاده می شود از این مکانیزم هم چنین به عنوان مولد سینوس – کسینوس در اجزای محاسباتی بهره گرفت . از مکانیزم های مختلفی برای تبدیل یک حرکت رفت وبرگشتی به یک حرکت دورانی و برعکس می توان استفاده نمود اما هیچ یک از این مکانیزم ها نمی تواند یک حرکت رفت و برگشتی سینوسی کامل را بوجود آورد مگر مکانیزم یوغ اسکاچ .
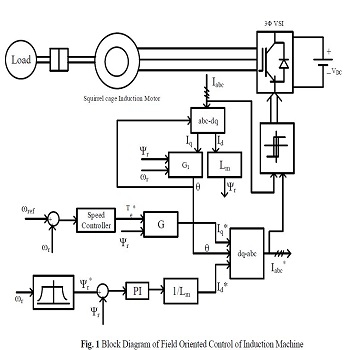
مکانیزم اسکاچ یک مکانیزم رفت و برگشتی است که در آن حرکت خطی به جرکت دورانی تبدیل میشود ، یا بالعکس. در این مکانیزم پیستون یا عضوی که حرکت رفت و برگشتی دارد بصورت higher pair یا lower pair به عضو دوران کننده در مکانیزم کوپل شده است که در حالت اول این اتصال بصورت cam و follower است و در حالت دوم بصورت شیار میتواند باشد. زمانی که سرعت عضو دورانی ثابت باشد موقعیت پیستون برحسب زمان در این مکانیزم یک حرکت هارمونیک ساده با فرکانس ثابت خواهد بود
بخشی از فایل راهنما
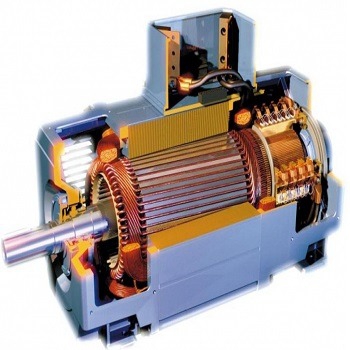
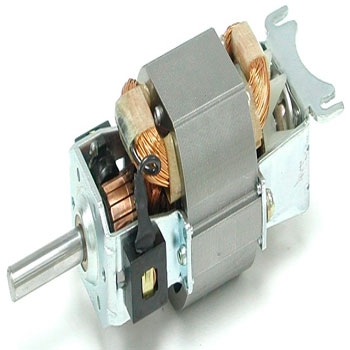
– مروری بر مهمترین مقالات و بررسی کاربردها مکانیزم یوغ اسکاچ کاربردهای متنوعی در صنعت دارد و پژوهش های متنوعی در این باره توسط محققین و صنعتگران ارائه شده اند [1]–[4] . این دستگاه و مکانیزم معمولا برای کنترل شیر محرک در خط لوله های انتقال گاز و نفت با فشار بالا در صنایع نفت و پتروسیمی کاربرد دارد. همچنین از این مکانیزم در ساخت موتورهای احتراق داخلی همچون موتور bourke و موتور sytech و تعدادی دیگر از موتورهای هوای داغ و موتورهای بخار استفاده شده است [5] .کاربری دیگر آنها نیز پمپ و کمپرسورهای رفت و برگشتی [6], [7] ، رباتیک و فرآیند تولید کارگاهی و ساخت و تولید ماشین ابزار برش [8] است. از این مکانیزم در تست ماشین هائی برای شبیه سازی ارتعاشاتی که دارای حرکت هارمونیک ساده هستند استفاده می شود [9] . همچنین از مکانیزم یوغ اسکاچ برای ایجاد کوپلینگ در سیستم های الکترومکانیکی [10] استفاده می شود . علاوه بر این مکانیزم یوغ اسکاچ بر روی پیستون نیروی عرضی ایجاد نمی کند، بنابراین یکی از مهمترین مزیت های آن در موقعیت های کاربردی کاهش اصطکاک بین اجزا، ارتعاشات ناخواسته و سایش پیستون است ، همچنین سایز و ابعاد موتور هم کاهش پیدا می کند

یونژی و همکاران [4] در سال 2009 طراحی و عملکرد کنترل حرکتی یک مکانیزم اسکاچ یوک را برای ساخت رباتی که حرکتی شبیه دلفین را ایجاد می کند ، انجام داده اند. از آنجا که دلفین ها خود را با نوسانات پشتی بدنبال یک مسیر سینوسی با دامنه های قابل تغییر حرکت می دهند ، یک مکانیزم یوغ اسکاچ دو موتوره به عنوان پیشران اصلی برای ایجاد نوسانات سینوسی اعمال شده است ، درحالی که یک ترکیب خاص از یک مکانیسم پیچ پیشرو و مکانیسم rack and pinion است.
پروژه بررسی و طراحی مکانیزم یوغ اسکاچ با رابط بادامکی در متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.