


توضیحات
مدلسازی و کنترل عملگر زاویه ای الکترومکانیکی با متلب
عملگرهای زاویه ای ( Rotary actuators ) در واقع سرووهای موقعیت دهی دورانی هستند که کاربرد گسترده ای از جمله در کنترل بازوهای روباتیکی، کنترل سطوح پرواز ( Flight surfaces ) وسایل پرنده و … دارند. مهمترین انواع مختلف این عملگرها شامل، الکترومکانیکی، هیدرولیکی و نیوماتیکی میباشند. در این پروژه، در نظر داریم برای یک کاربرد خاص، مدلسازی و کنترل عملگر زاویه ای الکترومکانیکی را مورد بررسی قرار دهیم.
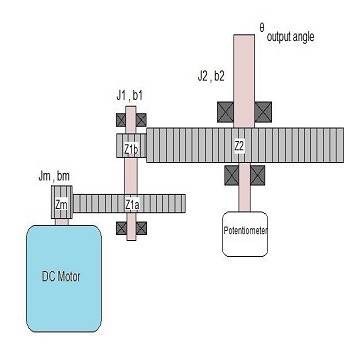
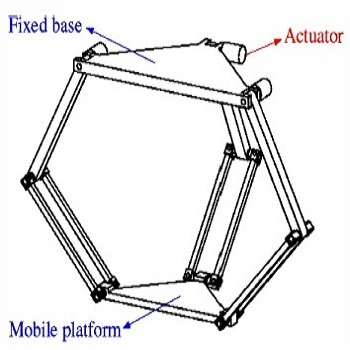
موتور الکتریکی از نوع جریان مستقیم DC جاروبک دار ( Brushed DC Motor ) است که قابلیت کنترل مناسبی از خود نشان میدهد. همچنین برای افزایش قدرت و کاهش سرعت خروجی، از یک گیربکس ۳ مرحله ای استفاده میشود (مطابق شکل). برای کنترل پسخورد (Feedback Control )نیز میبایست از یک سنسور موقعیت زاویه ای مانند پتانسیومتر یا انکدر جهت گزارش زاویه شفت خروجی در هر لحظه استفاده نمود.
با طراحی و نصب یک کنترلر مناسب زاویه محور خروجی ( θ) قادر خواهد بود که به طور سریع و دقیق فرمان زاویه مطلوب را، حتی در حضور اغتشاشات خارجی، تعقیب نماید ( Tracking) لازم به ذکر است، برای پاسخ پله مطلوب نهایی، فراجهش کمتر از ۵ درصد و زمان نشست حداکثر ۳۰ میلی ثانیه (با معیار ۲ درصد) مورد نظر است. همچنین پهنای باند عملگر باید بزرگتر از ۲۷ هرتز باشد.
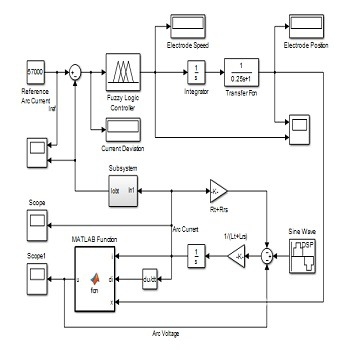
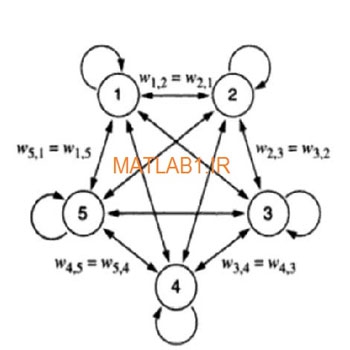
شماتیک مسئله مورد بررسی در این پروژه در شکل ۱ آمده است. مشخصات محورهای گیربکس در جدول صفحه بعد آمده است.
مدلسازی و کنترل عملگر زاویه ای الکترومکانیکی با متلب
نوع موتور DC مورد استفاده: موتور جریان مستقیم جاروبک دار ( Brushed DC motor برای شرکت Maxon )
مشخصات موتور: RE35 ϕ۳۵mm, Graphite Brushes, 90Watt,) number:285795)

مدلسازی و کنترل عملگر زاویه ای الکترومکانیکی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.