
توضیحات
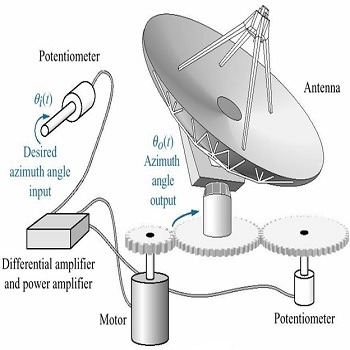
شبیه سازی کنترل موقعیت آنتن Azimuth با متلب
بخش اول: پاسخ مدار باز
تابع تبدیل مدار باز به صورت زیر است

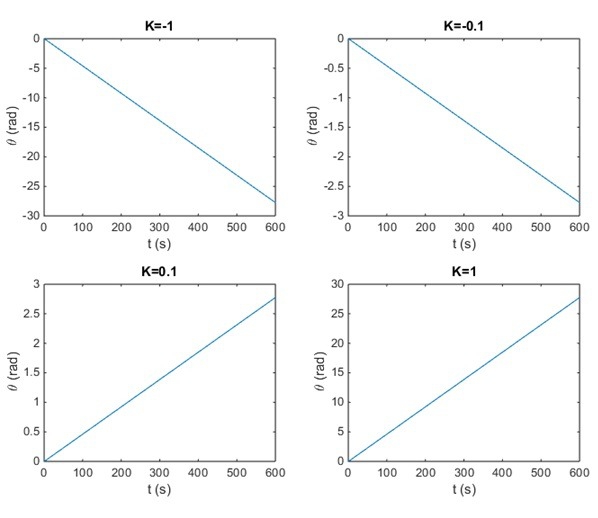
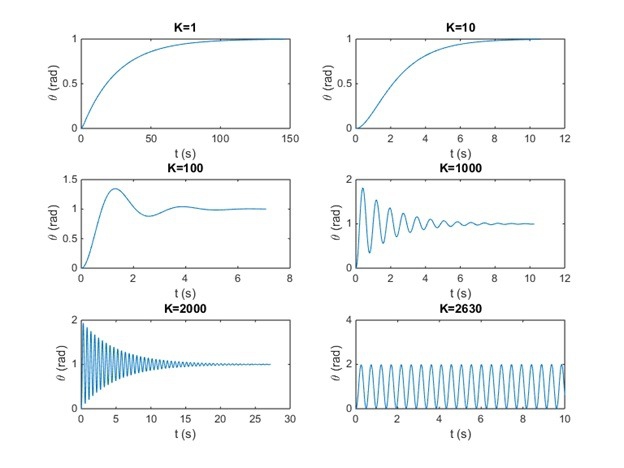
سیستم مدار باز از آنجایی که داری یک قطب در مبدا است، به ازای تمامی مقادیر K ناپایدار است) به غیر از K=0 که خروجی همواره صفر خواهد بود). پاسخ ورودی پله مدار باز سیستم به ازای مقادیر مختلف K به صورت زیر میشود
شکل ۱ پاسخ پله واحد سیستم مدار باز برای k های محتلف
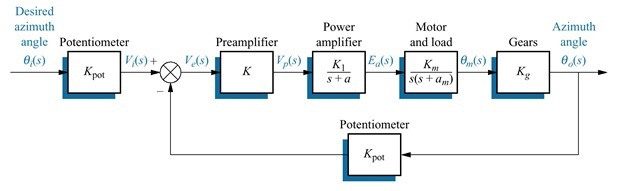
بخش دوم: پاسخ مدار بسته
تابع تبدیل سیستم مدار بسته به صورت زیر است
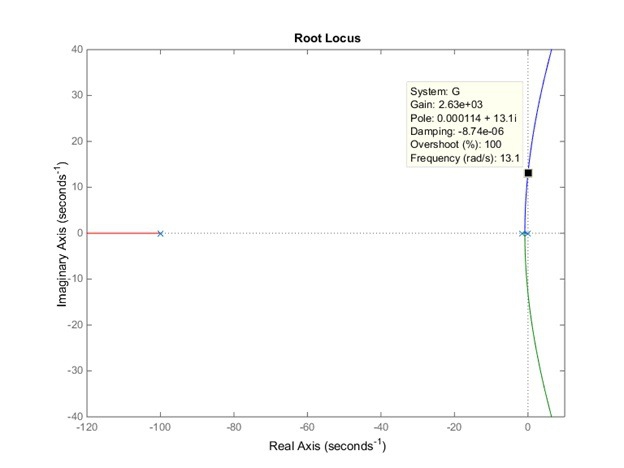
با استفاده از مکان هندسی ریشهها قطبهای سیستم حلقه بسته را بررسی میکنیم. همانطور که در شکل ۲ نشان داده شده است سیستم حلقه بسته دارای ۳ قطب است که به ازای K کمتر از حدود ۲۶۳۰، دارای مقادیر حقیقی منفی هستند که به معنی پایداری سیستم است. برای ۱۰٫۹ K< سیستم داری سه قطب حقیقی منفی است، که به معنی داشتن پاسخ بدون نوسان و فراجهش است.
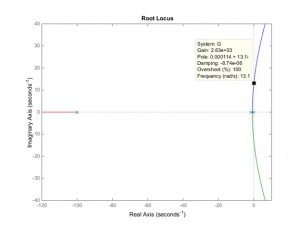
شکل ۲ مکان هندسی ریشهها و پیدا کردن K مرز پایداری
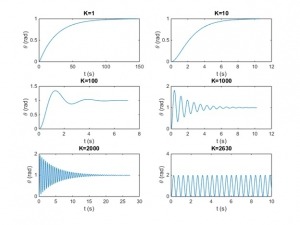
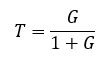
شکل ۳ پاسخ پله واحد سیستم مدار بسته برای k های محتلف
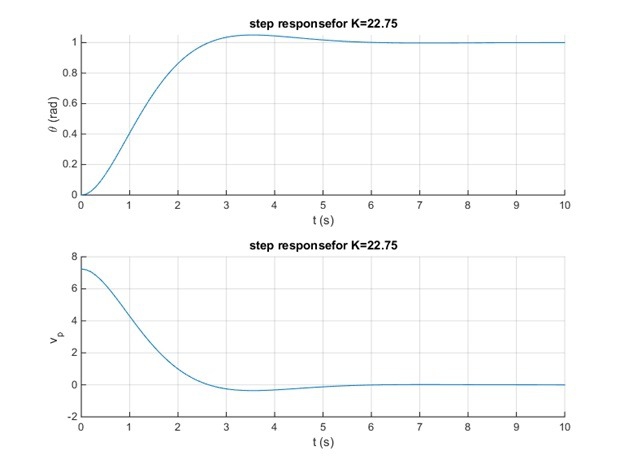
بهترین پاسخ را میتوان برای K=22.75 بدست آورد (شکل ۴) که داری فراجهش %۵، زمان صعود ۲٫۶۴ ثانیه، و زمان نشست معیار ۰۲/۰ حدود ۴٫۹ ثانیه است. همچنین با در نظر گرفتن vp به عنوان معیار ورودی کنترلی میتوان میزان تغییرات آن را در شکل ۴ دید.
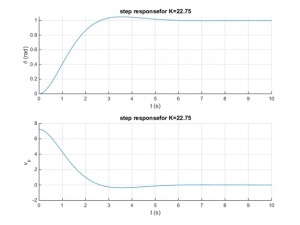
شکل ۴ بهترین پاسخ کنترل کلاسیک برای ورودی پله ورودی معادل آن
بخش سوم: پاسخ فیدبک حالت
بخش چهارم: Finite Time Settling Controller
بخش پنجم: مشاهدهگر مینیمال برای مدار باز پیوسته با ورودی پله
بخش ششم: کنترلر فیدبک حالت به همراه مشاهدهگر مینیمال در حالت پیوسته
بخش هفتم: کنترلر فیدبک حالت به همراه مشاهدهگر مینیمال در حالت گسسته
بخش پایانی: مقایسه چند حالت
شبیه سازی کنترل موقعیت آنتن Azimuth با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.