


توضیحات
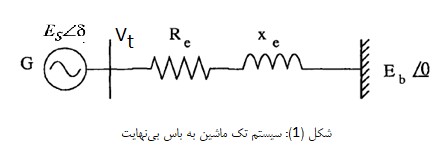
هدف از این پروژه، طراحی و شبیهسازی پایدارساز ماشین سنکرون برای سیستم تک ماشین به باس بینهایت مطابق شکل (1) است.
ابتدا لازم است ضرایب هفرون فلیپ ماشین سنکرون محاسبه شود. جزئیات محاسبات در ذیل ارائه شده است. لازم به ذکر است کد برنامه متلب برای محاسبه ضرایب با نام “heffron_phillips_coefficient” نیز ضمیمه پروژه گردیده است.
بخشی از گزارش کار:
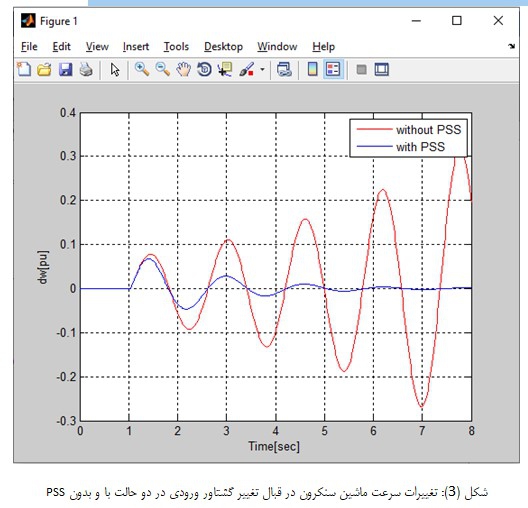
در لحظه T=1 sec، گشتاور مکانیکی ورودی به اندازه 10 درصد تغییر میکند و نمودار تغییرات سرعت در شکل (3) مانیتور میشود. رفتار سیستم قدرت در گذر از یک نقطه کار به نقطه دیگر با نوساناتی همراه است که فرکانس و میرائی این نوسانات تابعی از نقطه کار و ساختار شبکه است. نوساناتی که در اثر تغییر نقطه کار در زاویه روتور ژنراتورهاي سنکرون شبکه رخ میدهد و داراي فرکانسی در حدود چند دهم هرتز تا چندین هرتز است را نوسانات فرکانس پائین مینامند، که در اکثر مواقع اینگونه نوسانات مربوط به مدهاي الکترومکانیکی مولدهاي شبکه است. در صورتیکه گشتاور میراکننده ژنراتور کافی نباشد، این نوسانات براي مدت طولانی موجود بوده و حتی تشدید میشوند و این امر باعث محدود شدن قابلیتهاي انتقال قدرت روي خط انتقال و ایجاد فشار روي شفت مکانیکی میشود. همانطور که از شکل (3) ملاحظه میگردد، در صورتی که ماشین سنکرون مجهز به پایدارساز نباشد، سرعت روتور با دامنههای افزایشی، رشد کرده و سیستم ناپایدار میشود. یک راهحل ممکن جهت افزایش پایداري در چنین شرایطی، ایجاد میرایی مثبت از طریق تولید گشتاور الکتریکی همفاز با انحراف سرعت روتور است. این وظیفه توسط پایدارساز سیستم قدرت (PSS) انجام میشود. نقش اصلی PSS، اضافه کردن میرایی به نوسانات روتور ژنراتور به وسیله کنترل سیستم تحریک (AVR) از طریق سیگنال پایدارساز کمکی است. همانطور که از شکل (2) ملاحظه میگردد، با مجهز شدن ماشین سنکرون به PSS، میرایی نوسانات سرعت، افزایش یافته (میرایی مثبت) و ظرف چند ثانیه، تغییرات سرعت به صفر رسیده و سیستم پایدار میشود.
هدف از بخش دوم این پروژه، تعیین و تحلیل مودهای نوسانی سیستم است. جزئیات محاسبات مربوط به تعیین مودهای نوسانی در ذیل ارائه شده است.
محاسبات مودهای پیچشی:
در تحلیل عملکرد دینامیکی سیستم قدرت تاکنون فرض کردهایم که روتور توربین – ژنراتور از یک جرم واحد تشکیل شده است. در این مدل، نوسان مجموعه روتور توربین – ژنراتور نسبت به سایر ژنراتورها مدنظر است.
روتور توربین – ژنراتور بخار شامل ساختار بسیار پیچیده مکانیکی شامل چندین جرم غالب از قبیل روتورهای قسمت توربین، روتور ژنراتور، تزویجها و روتور تحریک کننده است که با محورهایی با سختی محدود به هم وصل شدهاند. بنابراین هنگامی که ژنراتور دچار انحراف میشود، نوسانهای پیچشی بین نواحی مختلف روتور توربین ژنراتور پدید میآید.
زمانی که هر کدام از اجرام روی یک محور، دارای ممان اینرسی جدا باشند و نسبت به هم دارای نوسان باشند، باید دینامیکهای پیچشی را در نظر گرفت.
مشخصههای دینامیکی سیستم محور با سه مجموعه پارامتر تعیین میشود:
- ثابت اینرسی H مربوط به جرمهای منفرد
- سختی پیچشی K مربوط به بخشهای محور که جرمهای مجاور را به هم وصل میکند
- ضریب میرایی D متناظر با هر جرم
بخشی از گزارش کار:
تحلیل مودهای پیچشی:
- در فرکانس طبیعی f=0، همانطور که از صورت مود شکل (1) ملاحظه میگردد، کل اجرام روتور با یکدیگر در مقابل سیستم قدرت، نوسان میکنند و هر کدام از اجرام نسبت به دیگری، پیچش (نوسان) ندارد. این مود به طور معمول در مطالعات پایداری در نظر گرفته میشود.
- در چهار فرکانس طبیعی به جز f=0، مودهای پیچشی از نوع نوسانی است.
- در فرکانس طبیعی f=16 Hz، همانطور که از صورت مود شکل (2) ملاحظه میگردد، پلاریته بردار ویژه متناظر با روتور اجرام HP و IP در جهت مخالف پلاریته بردار ویژه متناظر با روتور اجرام G، LPA و LPB است. این بدین معنی است که اگر این مود تحریک شود، روتور اجرام HP و IP در جهت مخالف روتور اجرام G، LPA و LPB نوسان و پیچش میکنند.
- در فرکانس طبیعی f=45 Hz، همانطور که از صورت مود شکل (3) ملاحظه میگردد، پلاریته بردار ویژه متناظر با روتور اجرام G، HP و LPB در جهت مخالف پلاریته بردار ویژه متناظر با روتور اجرام LPA و IP است. این بدین معنی است که اگر این مود تحریک شود، روتور اجرام G، HP و LPB در جهت مخالف روتور اجرام LPA و IP نوسان و پیچش میکنند.
- در فرکانس طبیعی f=2 Hz، همانطور که از صورت مود شکل (4) ملاحظه میگردد، پلاریته بردار ویژه متناظر با روتور اجرام G و IP در جهت مخالف پلاریته بردار ویژه متناظر با روتور اجرام LPA، LPB و HP است. این بدین معنی است که اگر این مود تحریک شود، روتور اجرام G و IP در جهت مخالف روتور اجرام LPA، LPB و HP نوسان و پیچش میکنند.
- در فرکانس طبیعی f=46 Hz، همانطور که از صورت مود شکل (5) ملاحظه میگردد، پلاریته بردار ویژه متناظر با روتور اجرام G، HP و LPA در جهت مخالف پلاریته بردار ویژه متناظر با روتور اجرام LPB و IP است. این بدین معنی است که اگر این مود تحریک شود، روتور اجرام G، HP و LPA در جهت مخالف روتور اجرام LPB و IP نوسان و پیچش میکنند.
- در فرکانس طبیعی f=16 Hz، صورت مود، یک مرتبه تغییر قطب میدهد. در فرکانس طبیعی f=24.45 Hz، صورت مود، دو مرتبه تغییر قطب میدهد. در فرکانس طبیعی f=32.2 Hz، صورت مود، سه مرتبه تغییر قطب میدهد. در فرکانس طبیعی f=47.46 Hz، صورت مود، چهار مرتبه تغییر قطب میدهد.
- مطابق صورت مود شکل (4)، جرم LPB در فرکانس طبیعی f=32.2 Hz، دامنه نوسان خیلی پایینی دارد. این بدین معنی است که این مود با اعمال گشتاور به روتور جرم LPB، به سادگی تحریک نمیشود.
- مطابق صورت مود شکل (5)، اجرام HP، IP و LPA در فرکانس طبیعی f=47.46 Hz، دامنه نوسان خیلی پایینی دارند. این بدین معنی است که این مود با اعمال گشتاور به روتور اجرام HP، IP و LPA، به سادگی تحریک نمیشود.
- در فرکانسهای طبیعی f=16 Hz و f=24.45 Hz حساسیت تحریک روتور جرم G نسبت به این مودها بیشتر است. در فرکانس طبیعی f=32.2 Hz، حساسیت تحریک روتور اجرام G و IP نسبت به این مود بیشتر است. در فرکانس طبیعی f=47.46 Hz، حساسیت تحریک روتور اجرام G و LPB نسبت به این مود بیشتر است.
- پروژه طراحی و شبیه سازی پایدارساز ماشین سنکرون و تحلیل مود های نوسانی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
-
سفارش پروژه متلب
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.







نقد و بررسیها
هنوز بررسیای ثبت نشده است.