
توضیحات
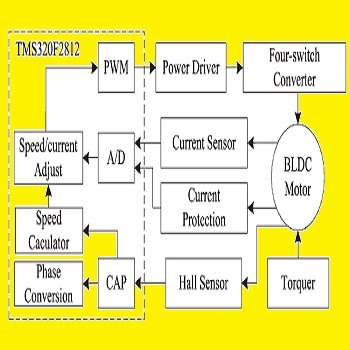
شبیه سازی کنترل موتور BLDC به کمک کنترل مد لغزشی با متلب
در این پروژه مدلسازی کنترل مد لغزشی برای موتور BLDC با توجه به مقاله مرجع انجام شده است. این پروژه شبیه سازی مقاله نمیباشد، بلکه صرفا مدل استفاده شده در آن مشابه مدل استفاده شده در مقاله بوده و نتایج با مقاله مقایسه و اعتبار سنجی نشده است. لینک دانلود مقاله مرجع را در همین صفحه میتوانید مشاهده کنید.
چکیده مقاله مرجع:
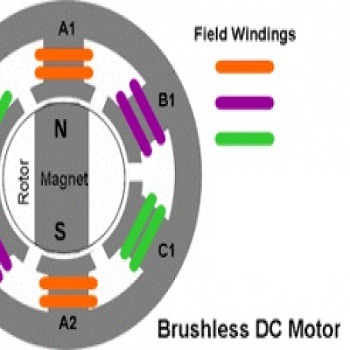
به طور عمده، موتورهای DC بدون برش در بسیاری از کاربردهای صنعتی و خانگی به دلیل مزایای آن مانند ساختار ساده، گشتاور بزرگ، زمان استفاده طولانی، تنظیم سرعت خوب استفاده شده است. به طور کلی، سیستم های BLDCM داراي ویژگی های نامطلوب و غیر خطی هستند که عملکرد کنترل کننده ها را کاهش می دهد. بر اساس این دلایل، کنترل حالت کشویی (SMC) یکی از استراتژی های کنترل محبوب برای مقابله با سیستم نامشخص غیر خطی است. در این کار یک طرح SMC برای ردیابی سرعت موثر با به دست آوردن گشتاور رایگان موج دار از طریق کنترل جریان حلقه درونی برای BLDCM اجرا شد. مدل ریاضی دوم سفارش BLDCM برای اهداف شبیه سازی طراحی شده است. دو کنترل کننده لغزشی مرتبه اول براساس الگوریتم قانون دقیق رسیدن به منظور کنترل جریان فعلی حلقه و همچنین کنترل سرعت حلقه بیرونی درایو طراحی شده است. عملکرد ردیابی سرعت پس از آن با یک کنترل کننده کلاسیک PI (Proportional and Integral) برای حلقه سرعت و مزایای طرح حالت کشویی مرتبط با کاهش خطای حالت ثابت، زمان استقرار، درصد بیش از حد و رد کردن اختلال، مقایسه شده است. این طرح مقاوم در برابر تغییرات پارامتر است. این کار با استفاده از MATLAB با مطالعات شبیه سازی انجام شده است.
شبیه سازی کنترل موتور BLDC به کمک کنترل مد لغزشی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.






نقد و بررسیها
هنوز بررسیای ثبت نشده است.