توضیحات
شبیه سازی کنترل عمق زیردریایی خودکار با منطق فازی با متلب :
عنوان مقاله:
کنترل عمق یک زیردریایی خودکار با کمک منطق فازی
چکیده مقاله:
This paper presents an adaptive fuzzy logic based controller for the depth control of an Autonomous Underwater Vehicle(AUV). The kinematic and dynamic motion of an AUV is described using six degree of freedom differential equations of motion using bodyand earth-fixed frame of references. Due to hydrodynamic forces, these equations are complex, non-linear and highly coupled therefore are impractical for use in controller design. In practice, system is commonly decomposed into three noninteractive systems such as diving subsystem, steering subsystem and speed subsystem. In this study a reduced order model was derived for diving system using depth plane dynamics and a suitable dual loop control strategy is formulated by synthesizing fuzzy logic based control in series with a phase lead dynamic compensator to achieve the desired set point tracking and reasonably good performance objectives under variety of disturbances encountered in oceanic environments.The obvious benefits of this type of approach lies in the simplicity of the scheme compared to the conventional deterministic systems and easy implementation for real time control of the Autonomous Underwater Vehicles. The proposed fuzzy logic based controller accepts deterministic information, the depth of the vehicle as input and achieves imprecise reasoning and de-fuzzification to generate a deterministic control output which manipulates the pitch angle and hence the depth of the vehicle. The simulated results clearly demonstrate the efficacy of this approach as compared to the conventional PID controller designed and tuned using Ziegler-Nichols scheme
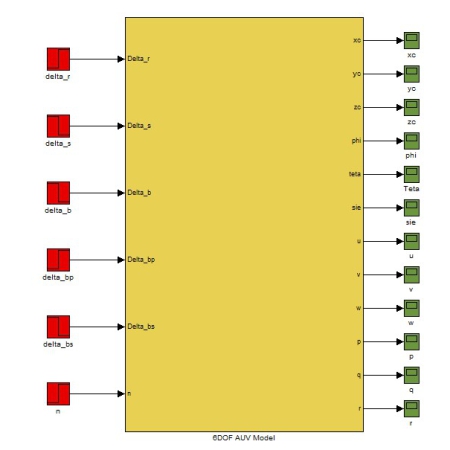
این محصول دارای ۳ برنامه در سیمولینک شامل:
Pn_PID.mdl
Pn_fuzzyPD.mdl
Pn_comp_fuzzyPD.mdl
و دو فایل برای سیستم فازی به نامهای pn.fis ، pnn.fis (دو سیستم فازی یکسان هستند و فقط برای استفاده در دو فایل سیمولینک اسم آنها را عوض کردیم که مشکلی در اجرای برنامه پیش نیاید) و یک فایل کد به نام pn1.m میباشد.
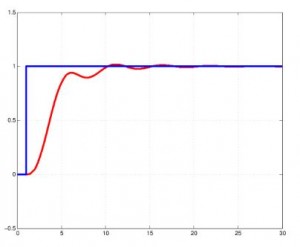
در ادامه تصاویری از شبیه سازی مقاله دیده میشود:
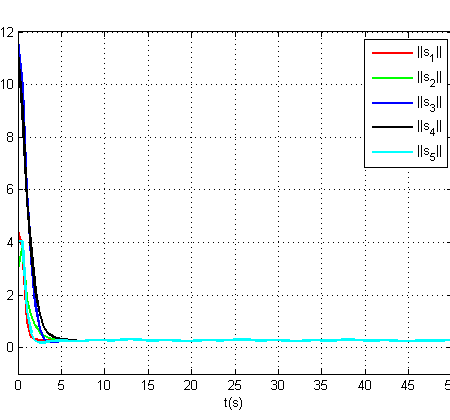
در ادامه نمودارهای استخراج شده دیده میشود:






نقد و بررسیها
هنوز بررسیای ثبت نشده است.