




توضیحات
شبیه سازی و طراحی کنترل کننده پسگام (بک استپینگ) مقاوم با متلب
در این پروژه یک مقاله مرجع وجود دارد که در آن از کنترل کننده پسگام انتگرالی استفاده شده است. کاری که در این پروژه انجام شده است تغییر کنترل کننده مذکور به کنترل کننده پسگام مقاوم است.
چکیده مقاله مرجع:
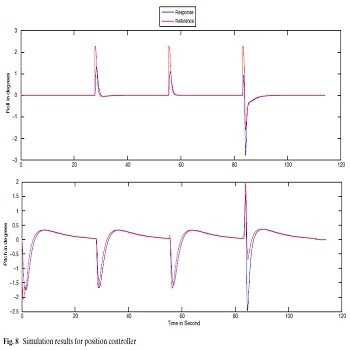
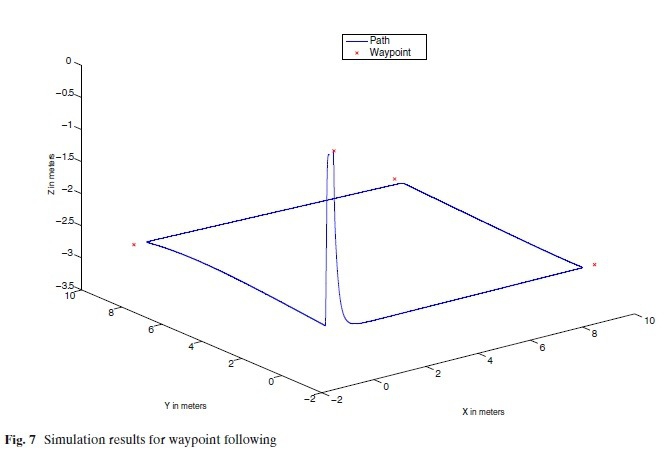
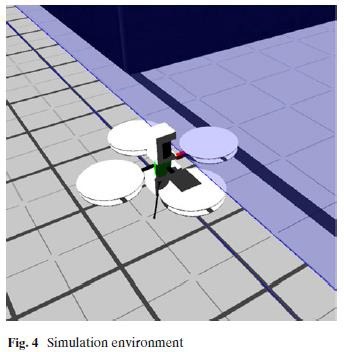
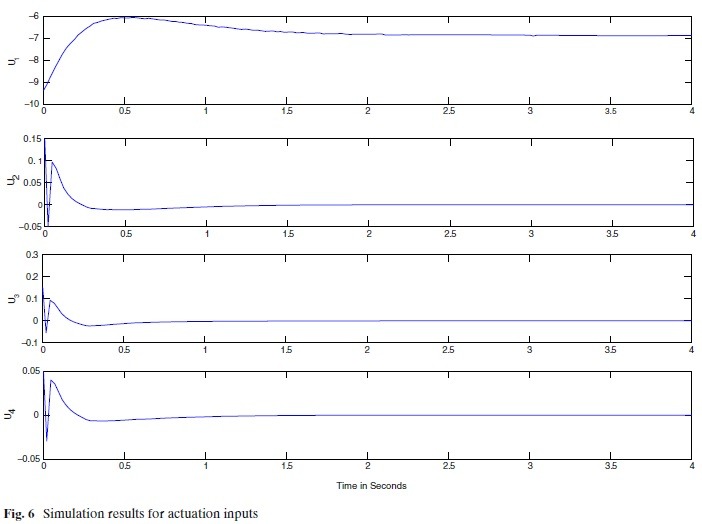
این مقاله پیشرفت و توسعه یک ساختار شبیه سازی شده چهار روتور غیرخطی را به همراه یک کنترلر غیر خطی ارائه می کند. مشکلات پایداری و هدایت چهار روتور توسط معماری حلقه های کنترل تو در تو حل می شود.یک کنترلر غیر خطی پسگام (backstepping) برای پایداری حلقه داخلی اجرا می شود.این(کنترلر)وضعیت مرجع ،ارتفاع و مسیر حرکت هواپیما را بطور مجانبی ردیابی می کند. کنترلر حلقه خارجی مسیرهای مرجع را برای کنترل حلقه داخلی ایجاد می کند تا بدین وسیله به ایستگاههای هوائی مطلوب برسد.برای تضمین محدوده مسیرهای مرجع یک کنترلر pd با عملکرد در ناحیه اشباع برای حلقه خارجی بکار می رود.به علت پیچیدگی موجود در آزمایش و توسعه کنترلر،یک ساختار شبیه سازی ایجاد شد.این ساختار بر پایه شبیه سازی رباتیک بدن ه سه بعدی و برنامه دینامیکهای موتور (ODE) می باشد.





شبیه سازی و طراحی کنترل کننده پسگام (بک استپینگ) مقاوم با متلب
شبیه سازی و طراحی کنترل کننده پسگام (بک استپینگ) مقاوم با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.