توضیحات
شبیه سازی مقاله اجماع عوامل درجه یک با تأخیر اطلاعات همسایگان با متلب
مقدمه:
در این مقاله به شبیه سازی یک الگوریتم برای کنترل چند شی متحرک که با هم طبق یک توپولوژی ارتباط دارند. یعنی برخی از این اشیاء متحرک از طریقی از وضعیت شی یا اشیاء دیگر اطلاع دارد. ولی باید توجه کنیم که این اطلاع دارای یک تاخیر نامشخص است. به عبارتی دیگر اطلاعی که شی مورد نظر از دیگر اشیاء دارد مشخص نیست برای چه زمانی می باشد. ولی به طور کلی میزان تاخیر در یک بازه قرار می گیرد و محدود می باشد.
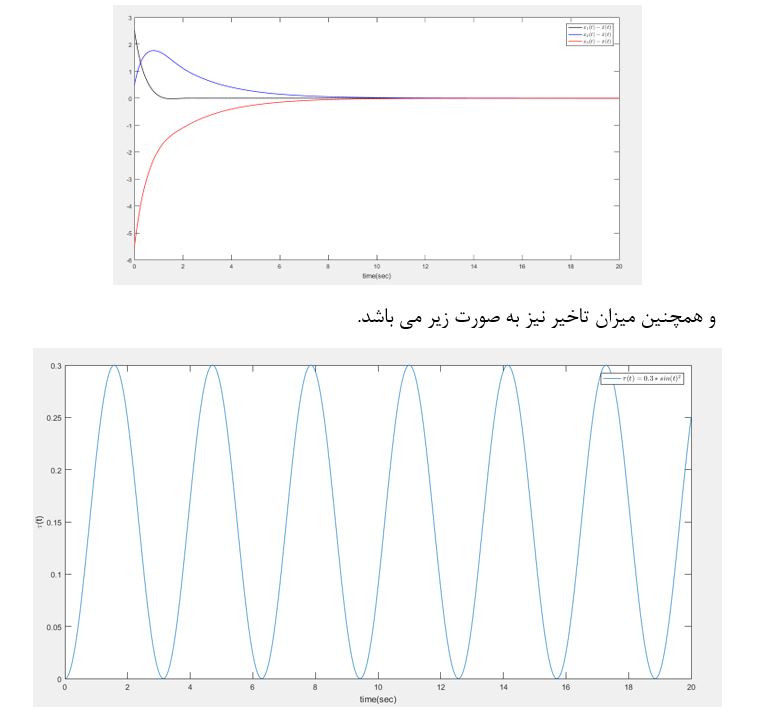
حال در این مقاله یک روش کنترلی بیان شده است که می تواند این سیستم را به نحوی کنترل کند که بعد از مدتی به یک مسیر برابر و مورد نظر برسند. به عبارتی این سیستم قادر خواهد بود که اثر شرایط اولیه نابرابر و همچنین تاخیر در انتقال اطلاعات بدون دانستن میزان تاخیر از بین ببرد.
توضیح مسئله:
فرض کنید یک سیستم با معادلات زیر داشته باشیم.
که در آن برای همه اشیاء متحرک معادلات ثابت می باشد.
این اشیاء طبق روابط زیر با یکدیگر در ارتباط هستند.
در این مجموعه یک ماتریس به نام A وجود دارد که یک ماتریس متقارن می باشد.
و مقدار aij هگر بین شی پرنده i ام و j ام ارتباط برقرار باشد 1 و در غیر این صورت صفر خواهد بود.
مجموع هر سطر از ماتریس A بیانگر این است که هر شی با چند شی دیگر در ارتباط می باشد و آن ها را با di نمایش می دهیم. به عنوان مثال d1 بیانگر این است که شی شماره 1 با چند شی دیگر در ارتباط می باشد. انجام پروژه متلب
کد نویسی برای مثال:
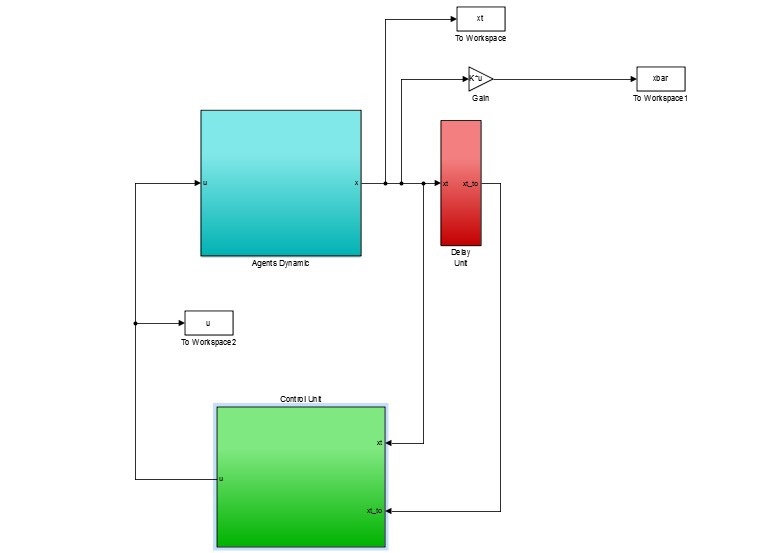
سیستم زیر را در سیمولینک طراحی کرده ایم.
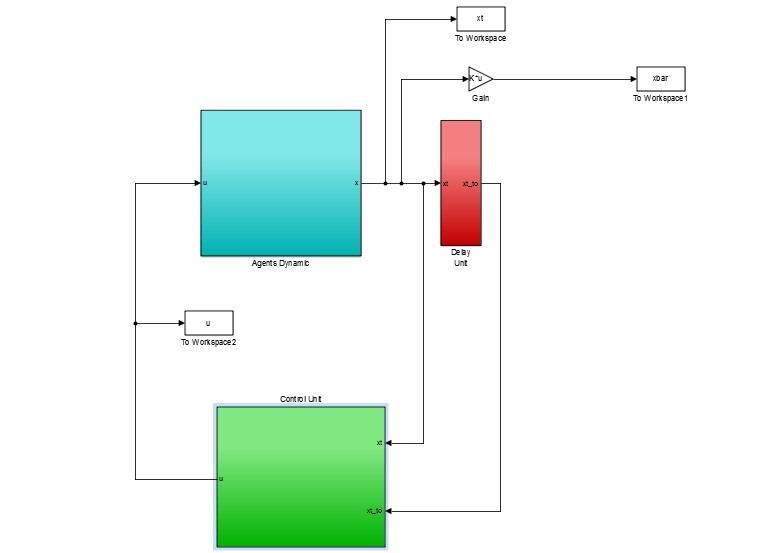
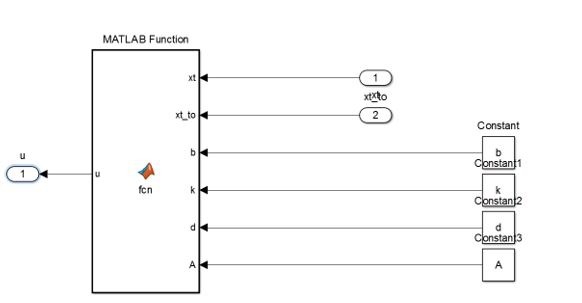
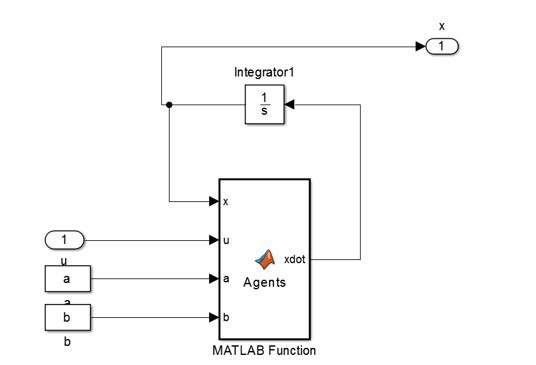
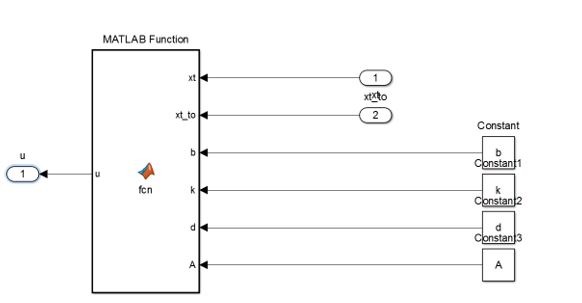
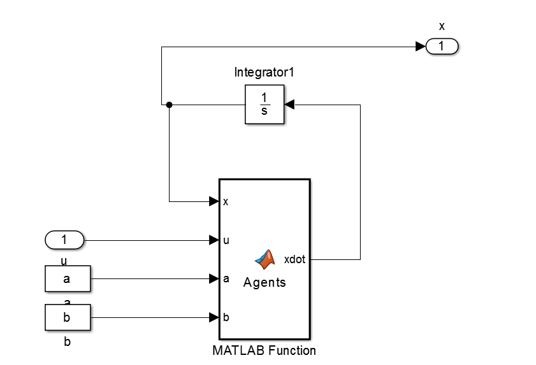
بلوک آبی رنگ معادلات مربوط به حرکت اشیاء را مشخص می کند، و بلوک قرمز رنگ تاخیر را ایجاد می کند. و بلوک سبز رنگ نیز قانون کنترلی بیان شده را اعمال می کند.
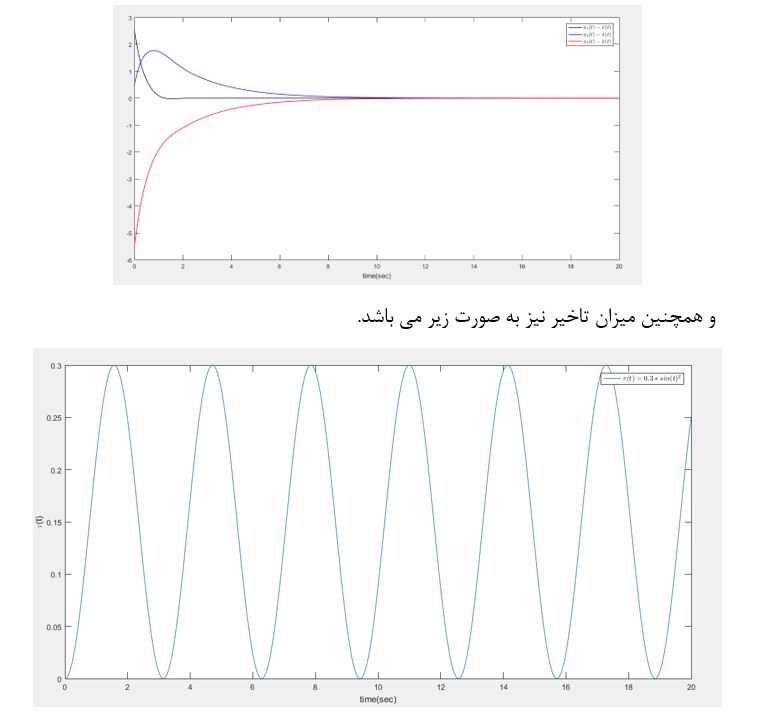
در مثال ارائه شده، روابط به صورت زیر
خلاصه
این مقاله به مسئله اجماع برای سیستم های چند عاملی مرتبه اول نسبت به توپولوژی غیرمستقیم مربوط می شود. با این فرض که توپولوژی متصل است و هر عامل اطلاعات همسایه ها را با تأخیر ارتباطی متغیر با زمان دریافت می کند ، تاخیر مجاز بسته به پویایی عامل ، ساختار توپولوژی و سود کنترل به دست می آید. به طور خاص ، در مورد سیستم های یکپارچه کننده مرتبه اول ، هرگونه تأخیر بزرگ و در عین حال محدود ، برای توافق تحمل می کند. سرانجام ، اثربخشی نتیجه نظری از طریق مثال عددی نشان داده شده است. شرایط شاخص – اجماع ، سیستم های چند عاملی ، تاخیر در برقراری ارتباط ، توپولوژی بدون جهت. من.
معرفی
اخیراً ، بیشتر و بیشتر محققان توجه به اجماع سیستم های چند عاملی را به دلیل طیف گسترده ای از کاربردهای آن آغاز کرده اند ([1] – [3]). اجماع به معنای طراحی الگوریتم یا پروتکل مناسب است تا تضمین کند همه عوامل می توانند در مورد مقادیر خاصی از علاقه به توافق برسند. در چند سال گذشته ، تحقیقات زیادی در مورد بررسی مسئله اجماع انجام شده است. در [4] ، اجماع برای سیستم های چند عامل تک انتگرال مورد مطالعه قرار گرفت. با استفاده از تئوری ماتریس غیر منفی ، اجماع نمایی در [5] برای سیستم های چند عاملی عمومی بررسی شد. در [6] ، اجماع سیستم های چند عامل سوئیچ شامل سیستم های فرعی با زمان پیوسته و گسسته مورد توجه قرار گرفت. وقتی ارتباطات شبکه تحت تأثیر اندازه گیری یا نویز کانال قرار می گیرد ، [7] اجماع قوی سیستم های چند عامل زمان گسسته را در نظر می گیرد. با توجه به محدود بودن سرعت انتقال سیگنال آکسونی و سرعت سوئیچینگ ، تاخیر ارتباطی در روند انتقال سیگنال اجتناب ناپذیر است. در شبکه واقعی ، تأخیر زمانی رفتارهای پویایی غیرمنتظره ای مانند بی ثباتی و نوسان و نوسان را نیز ایجاد می کند [8]. بنابراین ، لازم است تأثیر تأخیر در اجماع بررسی شود. تاکنون کارهای زیادی برای حل این مسئله انجام شده است. برای سیستم های چند عامل یکپارچه کننده مرتبه اول ، [9] شرایط لازم و کافی در حد بالای ارتباط ثابت را فراهم کرده است. این کار تا حدودی توسط بنیاد علوم طبیعی استان شاندونگ پشتیبانی می شود (ZR20l5PFOO6 ، ZR20l7BF035) ، پروژه دانشگاه علم و صنعت (Jl7KA083). تاخیر انداختن. با اتخاذ بخشی از اطلاعات ورودی تاریخی خود عامل در طراحی پروتکل ، شرایط اجماع بسته به ساختار پویا ، تاخیر زمانی و توپولوژی شبکه در [10] بدست آمد. تحت توپولوژی های متصل مشترک ، [11] در مورد اجماع سیستم های چند عامل مرتبه دوم با تأخیر زمان تحقیق کرد. فرض کنید که پویایی عامل در بیشتر اوقات بی ثبات باشد ، در [12 ، 13] از روشهای سود کم برای تضعیف اثر تأخیر بر اجماع استفاده می شود. اگر تأخیر در برقراری ارتباط فقط بر اطلاعات ارسالی همسایگان تأثیر بگذارد ، [14] شرایط اجماعی برای سیستم های چند عاملی یکپارچه کننده مرتبه اول ایجاد شد. مرجع [15] به مسئله اجماع در سیستمهای چند عاملی گسسته با تأخیرهای بی تغییر زمان پرداخته است. برای هر کنترل کنترل ثابت که از محدوده های پایدار انتخاب شود ، موفقیت اجماع عوامل با تأخیر ورودی و ارتباطی در [16] مورد مطالعه قرار گرفت.
شبیه سازی مقاله اجماع عوامل درجه یک با تأخیر اطلاعات همسایگان با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.