توضیحات
شبیه سازی سیستم با استفاده از روش پیش بین غیر خطی شبه طیفی گوسی با متلب
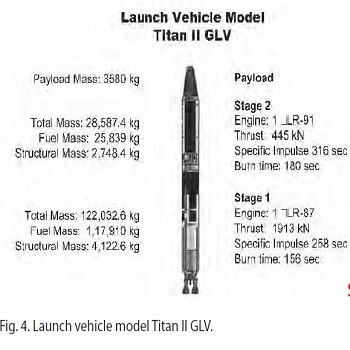
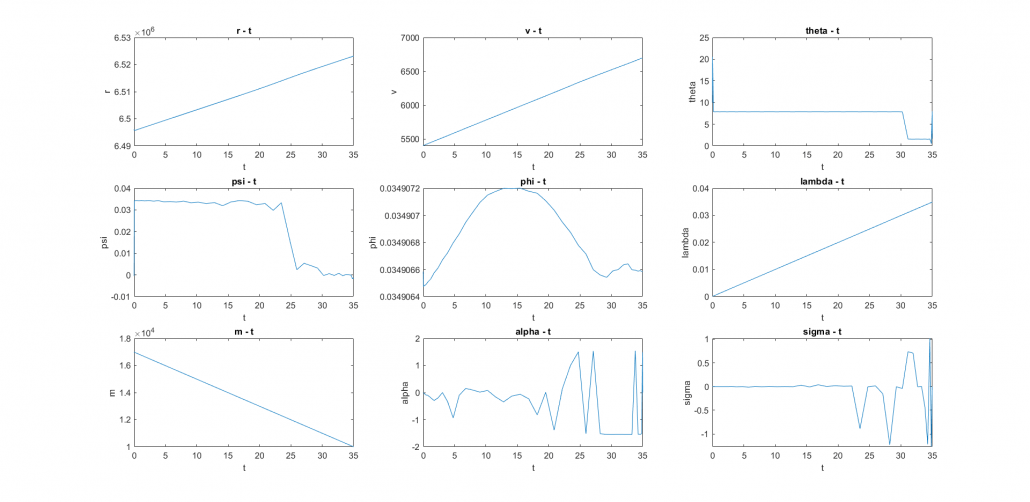
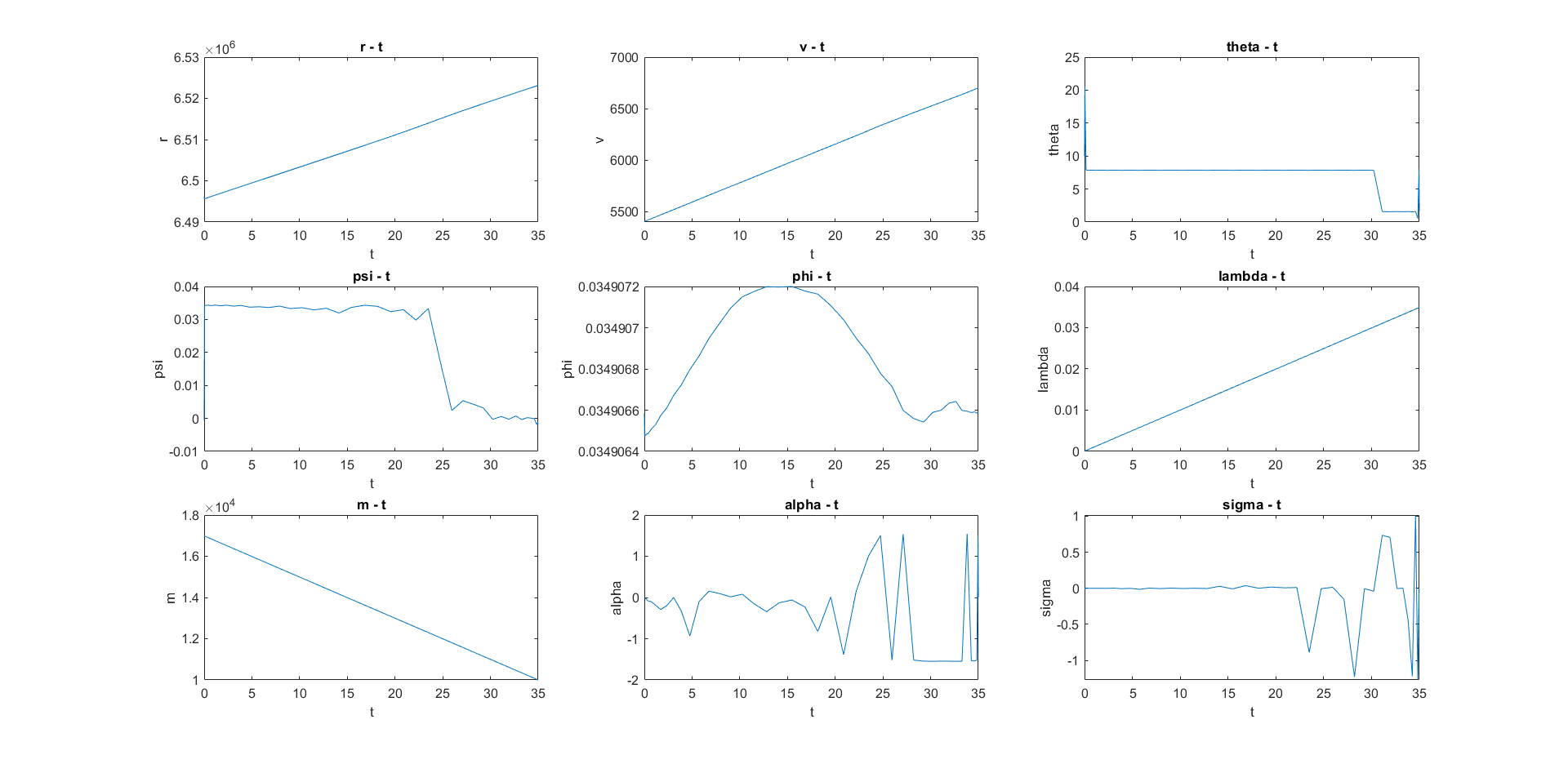
در این پروژه شبیه سازی سیستم بیان شده با استفاده از روش پیش بین غیر خطی شبه طیفی گوسی بیان شده در مقاله مرجع انجام شده است.
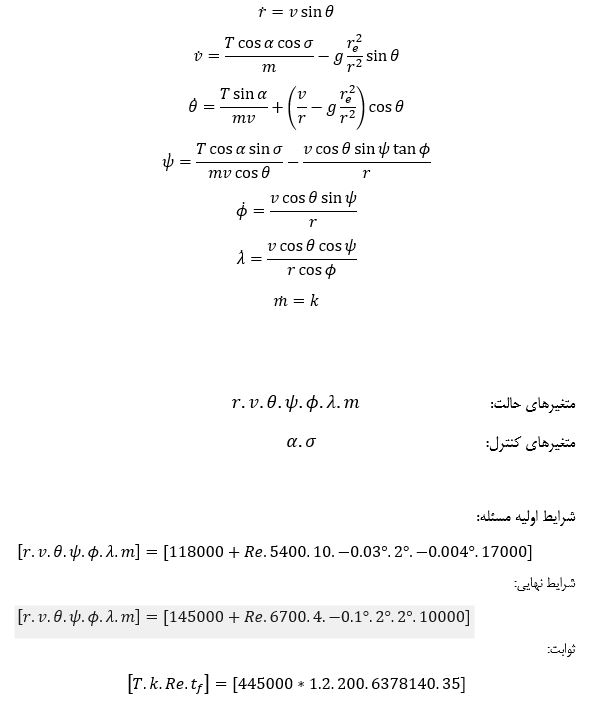
دینامیک مسئله بصورت زیر میباشد:
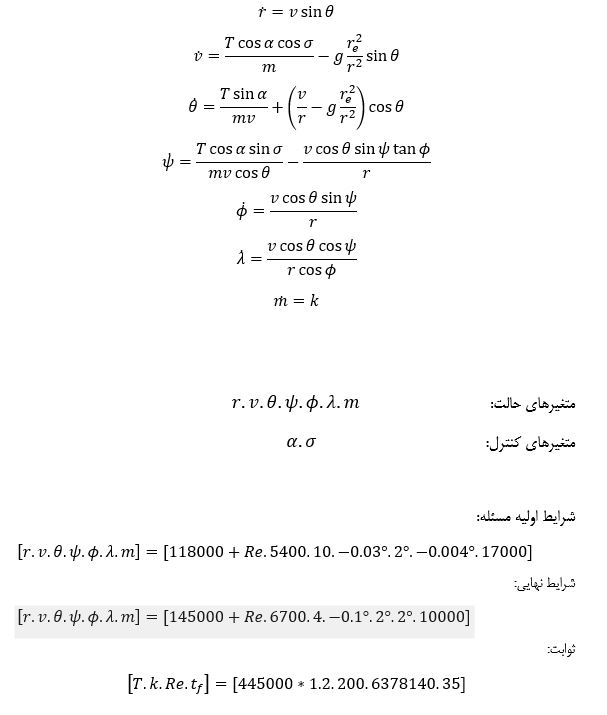
از آنجایی که مسئله fixed terminal time, fixed terminal state میباشد ترم تابع حالت نهایی از تابع هدف مسئله بهینهسازی حذف شده و نیازی به محاسبه مقدار costate نخواهد بود.
در این مسئله از نقاط Legandre-Gauss (LG) استفاده میکنیم.
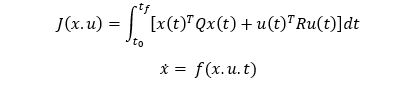
تابع هدف را طبق مقاله بصورت Linear Quadratic (LQ) تعریف میکنیم:
در مورد کنترلگر LQR در youtube آموزشهای خوبی قرار گرفته که با جستجوی همین کلید واژه میتوانید به آنها دست پیدا کنید.
در صورت مسئله هیچ محدودیتی در مسیر ذکر نشده در نتیجه محدودکننده g(x(t), u(t), t) = 0 را نداریم.
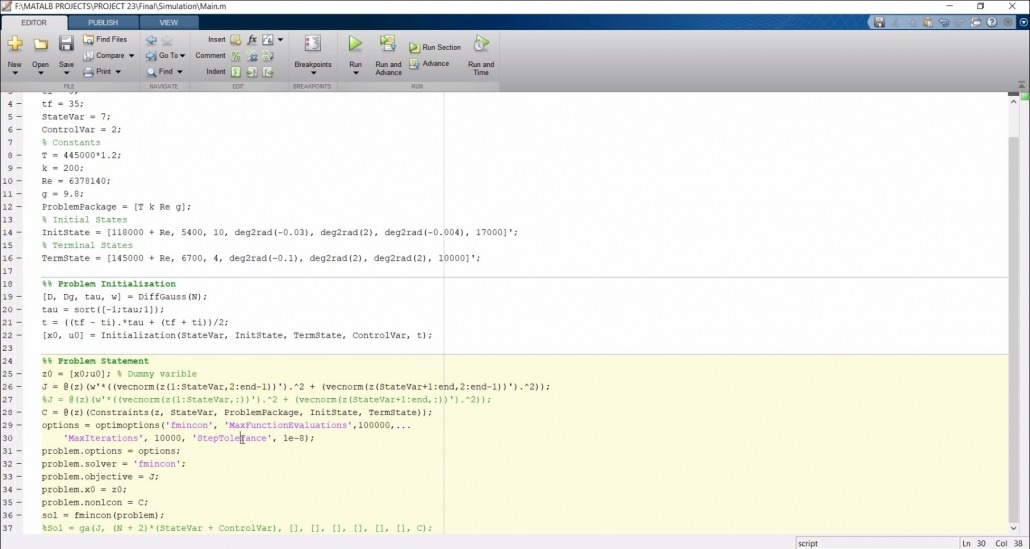
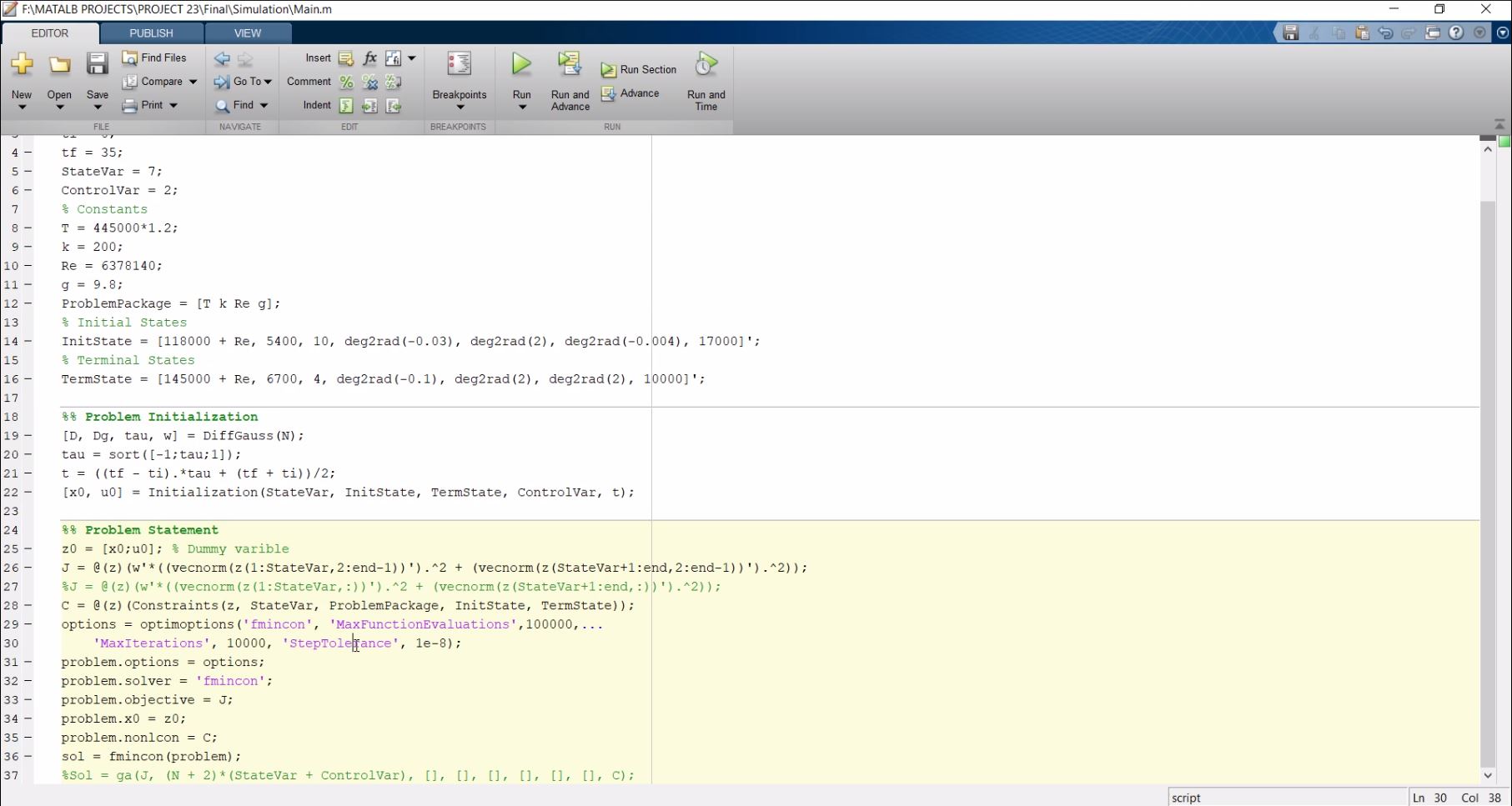
گسسته سازی:
ابتدا بازه زمانی خود را به بازه 0 تا 1 تبدیل کرده و نقاط LG را بر روی این بازه تعریف میکنیم.
چکیده
در این مقاله استفاده از روش پیش بینی مدل شبه طیفی برای هدایت برون اتفاقی پیشنهاد می شود. این روش تلفیقی از قانون شبه طیفی و کنترل پیش بینی مدل است که در آن یک مسئله مقدار مرزی دو نقطه ای با استفاده از مدل پیش بینی مدل تنظیم شده و با استفاده از قانون شبه طیفی حل می شود. در این کار ، این روش برای هدایت برون-اتمسفر با نیاز هدف خاص اعمال می شود. روشهای هدایت برون-اتمسفر موجود الزامات كلی برای راهنمایی را كفایت می كنند ، اما نمی تواند از محدودیتهای هدف خاص اطمینان حاصل كند. در حالی که ، روش ارائه شده قادر به انجام این کار است. قانون هدایت پیشنهادی از طریق شبیه سازی موارد آشفته ارزیابی می شود و آزمایشات نشان می دهد که این روش قادر است به صورت نیمه مستقل تحت اختلالات بردار کنترل و رانش عمل کند. انجام پروژه متلب
واژه های کلیدی: هدایت برون-اتمسفری ، مدل پیش بینی مدل Pseudospectral ، پیش بینی پیش بینی ، روش Pseudospectral Gauss ، Hypersonic
1. معرفی
هدایت خارج اتمسفر به راهنمایی فراتر از جو با اثرات آیرودینامیکی ناچیز اشاره دارد. در خلاuum ، یک وسیله نقلیه فقط از دو منبع با نیروهایی روبرو می شود: نیروی رانش و گرانش سیاره. به دلیل سادگی نسبی ، حلال بسته حلال بهینه یا تقریباً بهینه را می توان برای هدایت خلا بدست آورد. این به عنوان یک مزیت در سیستم هدایت وسایل نقلیه موجود در اتمسفر موجود استفاده شده است. برای مأموریتهای گذشته و حال ، روشهای هدایت خلاuum کافی بوده است. به عنوان مثال ، در یک مأموریت تزریق مداری ، فقط مدار و سرعت مورد نظر باید برآورده شود. برای CRV (Crew Return Vehicle) ، CLV (Crew Launch Vehicle) یا CaLV (Cargo Launch Vehicle) ، موقعیت انتهایی نسبتاً مهمتر است که روشهای راهنمایی خلا vac موجود می توانند اطمینان حاصل کنند. اما ، برای ماموریت های مربوط به تحویل محموله جهانی ، دقت مورد نظر بسیار دقیق تر از آنچه در حال حاضر انتظار می رود ، است. برای یک مأموریت تحویل محموله جهانی ، پرواز شامل مراحل اندو ، اگزو ، ورود مجدد و ترمینال پرواز است که تفاوت فاحشی با یکدیگر دارند. در یک مأموریت معمولی ، فاز اول در حال صعود از طریق جو است که توسط سیستم هدایت درون اتمسفر کنترل می شود که به طور کلی یک روش حلقه باز به دنبال یک مشخصات از پیش انتخاب شده است. هنگامی که ارتفاع برای غفلت از اثرات جوی کافی باشد ، سیستم هدایت خلاuum اثر می گیرد. در اینجا ، انتقال انجام می شود زیرا روشهای هدایت خلاuum نمی توانند در داخل جو اعمال شوند ، و روشهای موجود اتمسفر موجود استقلال کافی را برای اطمینان از دقت مورد نیاز ارائه نمی دهند. در این مقاله ، ما امکان یک روش پیش بینی مدل شبه طیفی اخیراً پیشنهاد شده برای هدایت برون اتفاقی را نشان می دهیم. این روش به ساده بودن پروازهای خلا re تکیه نمی کند ، و با این وجود ، می تواند راه حل قابل استفاده برای برنامه های آینده را ارائه دهد. این روش قبلاً برای پرواز درون اتمسفر نشان داده شده است ، بنابراین می تواند یک روش نامزد برای هدایت تمام مراحل سیستم تحویل جهانی باشد.
- شبیه سازی سیستم با استفاده از روش پیش بین غیر خطی شبه طیفی گوسی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.