توضیحات
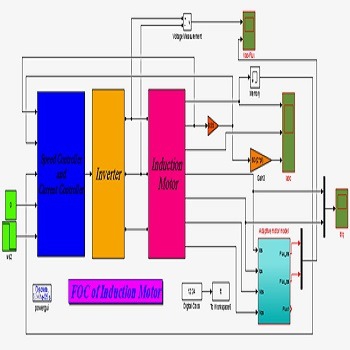
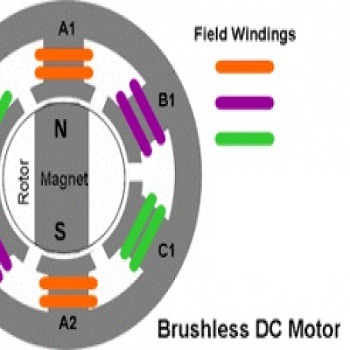
شبیه سازی روش کنترل میدان روتور موتور القایی با متلب
روشهای کنترل سرعت اقتصادیتر موتورهای القایی (IM) توسط مبدلهای فرکانس بدست آمد. توپولوژیهای مختلف بسیاری از این مبدلهای فرکانس در بسیاری از نوشتجات و مقالات بررسی و پیشنهاد شده اند، هر چند مبدلی که از یک بخش یکسوکننده دیودی، یک لینک DC و یک اینورتر ولتاژ با مدولاسیون پهنای پالس (PWM)[1] ساخته شده، بیشترین کاربرد را در صنایع دارد.
درایوهای موتورهای القایی که با اینورتر PWM با فرکانس کار بالا تغذیه میشوند، بایستی دارای ویژگیها و خصوصیات زیر باشند :
- دارای پاسخ گشتاور و شار سریع
- گشتاور خروجی ماکزیمم قابل دسترس در رنج وسیعی از سرعت کاری
- دارای فرکانس سوئیچزنی ثابت
- دارای مدولاسیون ولتاژ PWM تک قطبی
- دارای ریپل شار و گشتاور پایین
- دارای تغییرات زیاد پارامترها
- دارای عملکرد چهار ربعی
این مشخصهها به استراتژی کنترل بکاربرده شده بستگی دارد. هدف اصلی روش کنترل انتخابی ارائۀ بهترین پارامترهای ممکن درایو میباشد. علاوه براین شرط خیلی مهم درخصوص روش کنترل، سادگی و سهولت اجرای آن میباشد (الگوریتم ساده، تنظیم آسانتر و کارکردن با کنترلر با ابعاد کوچکتر تا در نهایت محصول نهایی با قیمت کمتر بدست آید ).
پارامترهای ماشین استفاده شده در این بخش به صورت زیر می باشد.
Rs= Rr= 2.608, Lm= 0.1722, Ls=Lr= 0.1722, J= 0.0131
شبیه سازی روش کنترل میدان روتور موتور القایی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.