توضیحات
شبیه سازی آموزشی کنترل حالت لغزشی تطبیقی برای ردیابی مسیر ربات متحرک با متلب
چکیده مقاله (ترجمه ماشینی)
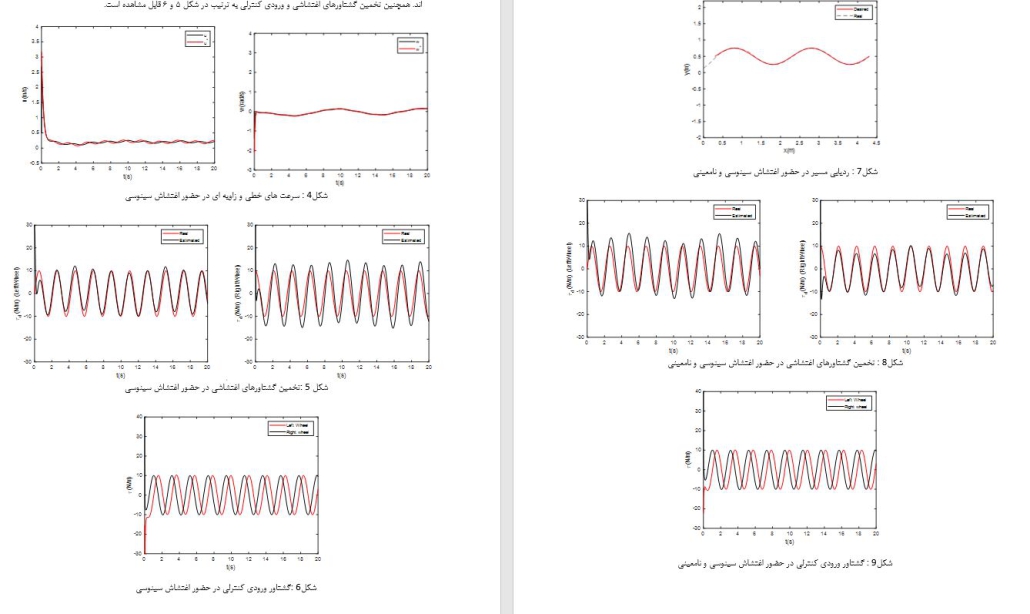
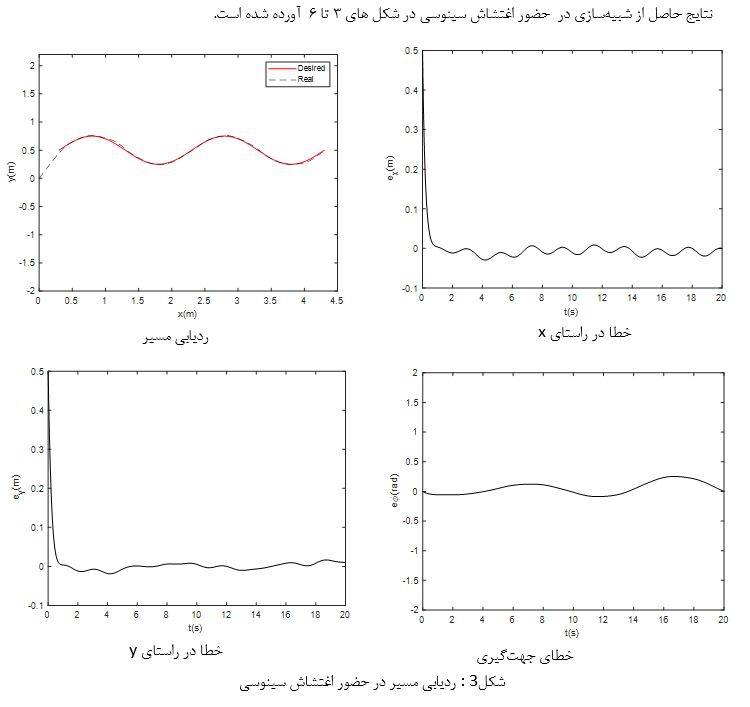
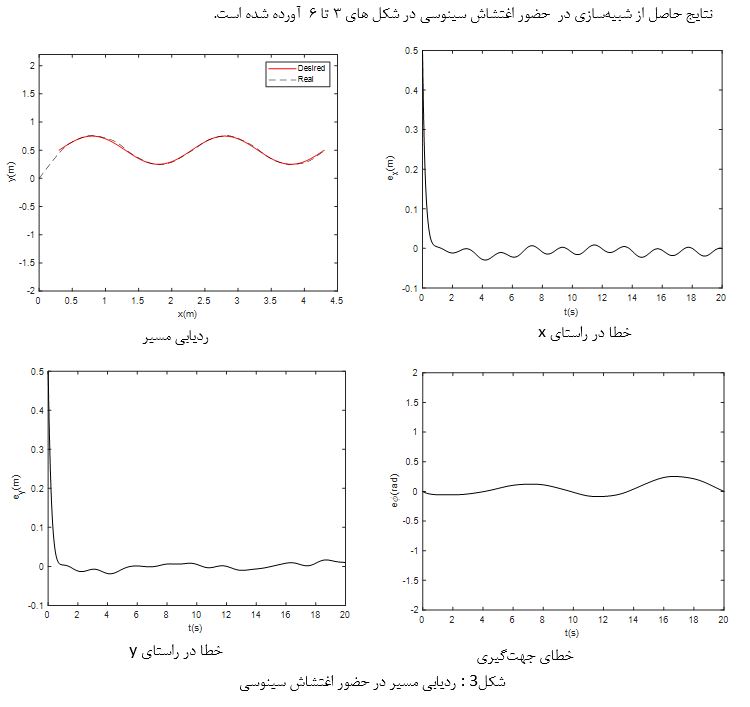
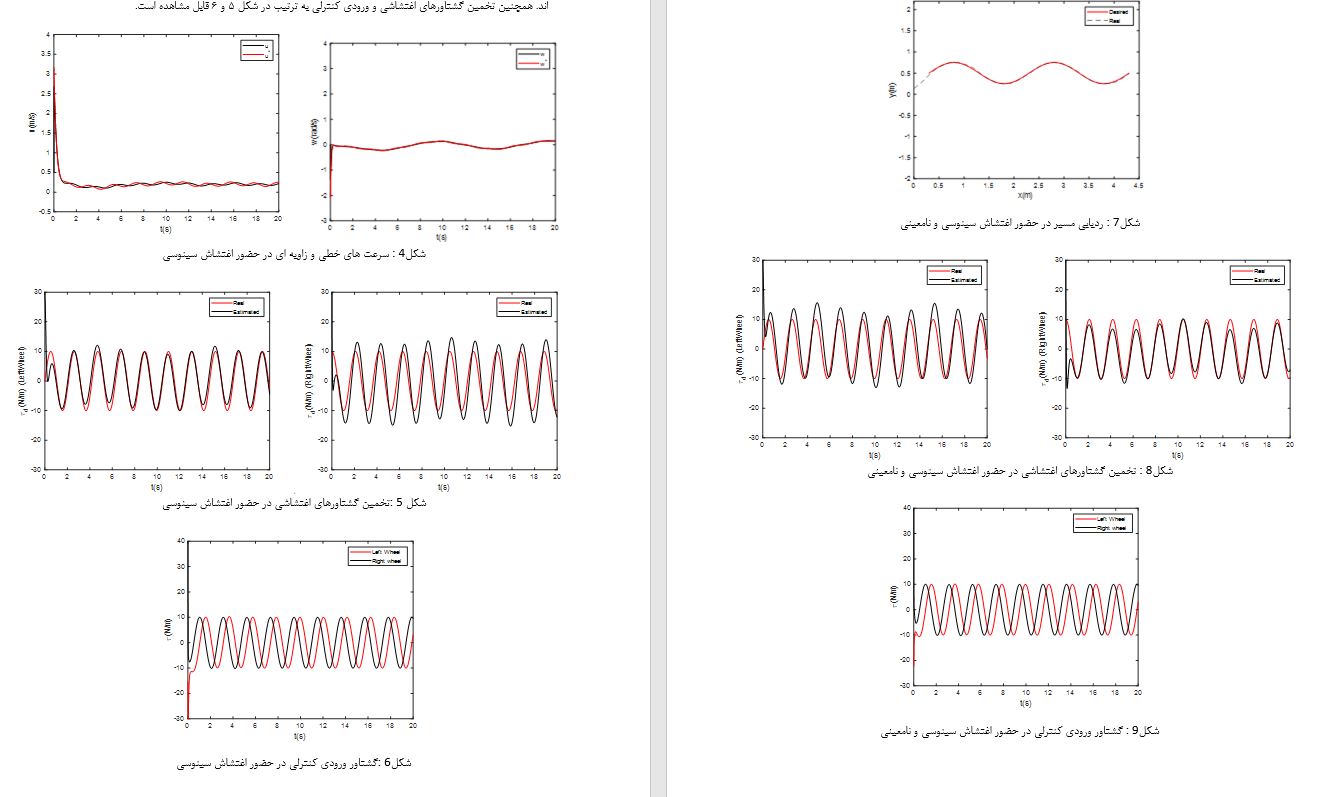
این مقاله یک کنترلر ردیابی مسیر تطبیقی جدید برای ربات متحرک چرخدار غیرهولونومیک تحت عدم قطعیت های سینماتیکی و دینامیکی طراحی می کند. یک کنترل کننده سرعت جدید که در آن پارامتر سینماتیکی تخمین زده می شود، فرمان سرعت ربات را تولید می کند. کنترلکننده دینامیکی حالت لغزشی تطبیقی طراحیشده دارای یک عبارت تخمینگر برای جبران اغتشاشات خارجی و عدم قطعیتهای دینامیکی و یک عبارت بازخورد برای بهبود پایداری حلقه بسته و محاسبه خطای تخمین اختلالات خارجی است. پایداری سیستم با استفاده از تئوری لیاپانوف تحلیل شده است. شبیه سازی های کامپیوتری استحکام طرح کنترل طراحی شده را تایید می کند.
معرفی
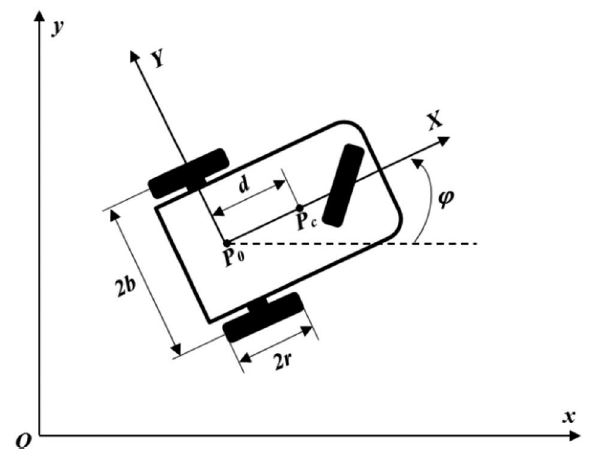
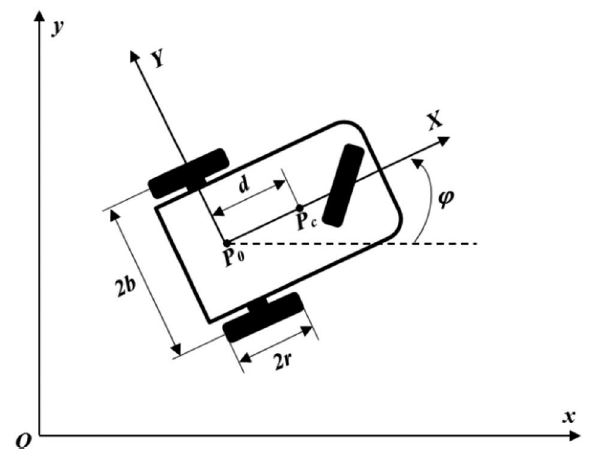
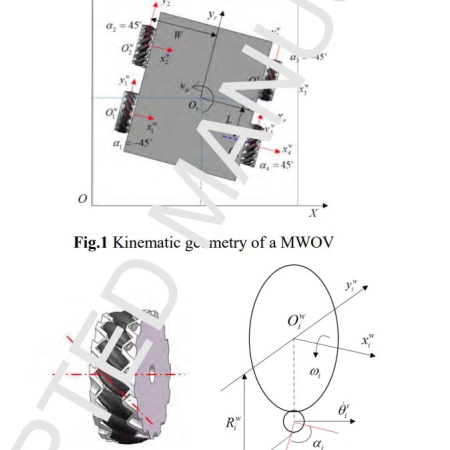
کنترل ربات متحرک غیرهولونومیک دو چرخ در دهههای گذشته توجه زیادی را به خود جلب کرده است زیرا کاربردهای بالقوه گستردهای در چندین زمینه (مانند معدن، حمل و نقل و سیارهای) دارد. این برنامه ها به ربات متحرک نیاز دارند تا بتواند مسیر مشخص شده را به طور پایدار ردیابی کند. طراحی کنترلکنندهای که ردیابی مسیر و استحکام در برابر دینامیک مدلسازیشده و مدلنشده را تضمین کند، چالش بزرگی برای مهندسان است. تحقیقات زیادی برای توسعه کنترلکنندههای تطبیقی برای کنترل حرکت روباتهای متحرک با اختلالات و عدم قطعیتها انجام شده است (وانگ، فوکائو و آداچی (2002)، اونات و اوزکان (2015)، دونگ، زو و هوو (2000)). برای این روشها، یک مدل پارامتری خطی از سیستم مورد نیاز است که در آن محاسبه ماتریس رگرسیون یک تحلیل خستهکننده را معرفی میکند. مشکل بار محاسباتی می تواند عملکرد کنترل را کاهش دهد. روش دیگر، کنترل هوشمند مبتنی بر شبکههای عصبی (سینگ و پرهی (2011)، گائو و همکاران (2014)، یه (2015)، هوانگ و کانگ (2016)) به روشی جالب برای کنترل سیستم ربات با استفاده از تقریب تابع تبدیل میشود. در سینگ و پرهی (2011)، نویسندگان کنترل کننده شبکه های عصبی را برای هدایت ربات در یک محیط واقعی توسعه دادند. روبات ها باید مسیر بهینه را پیدا کنند و از مانع اجتناب کنند. در گائو و همکاران. (2014)، نویسندگان شبکه های عصبی را بر اساس تابع پایه شعاعی ارائه کردند تا اثر لغزش چرخ را که روی ربات در جهت یابی در زمین های ناهموار تأثیر می گذارد، حذف کنند. در Ye (2015)، نویسندگان از دو کنترل کننده شبکه عصبی برای تنظیم سرعت و زاویه جهت ربات برای حل مشکل ردیابی مسیر استفاده کردند. یک شبکه عصبی تطبیقی با قانون به روز رسانی آنلاین برای کنترل حرکت ربات متحرک، زمانی که نیروی اختلال و لغزش چرخ رخ می دهد، ارائه شده است (هوانگ و کانگ (2016)). با این حال، استراتژی شبکه های عصبی دارای معایب بسیاری مانند ساختار درگیر، همگرایی کند و مشکلات در انتخاب شبکه مناسب است. کنترل حالت لغزشی به طور گسترده برای کنترل سیستم رباتیک مورد استفاده قرار می گیرد زیرا دارای ویژگی های جالبی مانند توانایی مقابله با عدم قطعیت ها، پاسخ سریع و غیره است (Matveev, Teimouri, and Savkin (2011), Yang et al. (2012), Matveev, تیموری و ساوکین (2012)، گراسیا، گارلی و سالا (2013)). با این حال، پدیده پچ پچ ناشی از عملکرد ناپیوسته، دینامیک فرکانس بالا بدون مدل را تحریک می کند و عملکرد سیستم را بدتر می کند. علاوه بر این، انتخاب مقدار زیادی از بهره سوئیچینگ در کنترل حالت لغزشی برای اطمینان از اثربخشی سیستم کنترل ممکن است باعث ایجاد درخواست های شدید در ورودی های کنترل و افزایش پدیده پچ پچ شود. برای غلبه بر این مشکلات، لیو، یو و ژانگ (2009) یک کنترل کننده حالت لغزشی مبتنی بر شبکه های عصبی را برای انجام کنترل ردیابی یک ربات متحرک در حضور اغتشاشات پیشنهاد کردند. آنها از تکنیکهای backstepping برای یافتن خروجی سرعت استفاده کردند و شبکههای عصبی کنترل حالت لغزشی و تابع پایه شعاعی را ترکیب کردند تا گشتاورهای ورودی لازم را بدست آورند. در Pamosoaji، Cat و Hong (2014)، نویسندگان یک کنترل کننده حالت لغزشی را طراحی کردند که با شبکه های عصبی تابع پایه شعاعی یکپارچه شده است تا مشکل اجتناب از مانع یک وسیله نقلیه چرخ دار نامشخص را حل کند. استحکام قابل توجهی در برابر عدم قطعیت ها به دست آمد. با این حال، ادغام کنترل حالت لغزشی با شبکه های عصبی در قانون کنترل، ساختار کنترل را بسیار پیچیده و از نظر محاسباتی گران می کند. کنترل حالت لغزشی تطبیقی در چن و همکاران مطرح شد. (2009) و آصف، خان و کای (2014). ایده استفاده از رویکرد لایه مرزی برای کاهش پدیده پچ پچ و بهره سوئیچینگ تطبیقی برای جبران اختلالات است. لازم به ذکر است که کنترل کننده های فوق به این موضوع توجه دارند که مرزهای بالای اختلالات مشخص باشد.
تصویر نتایج
شبیه سازی آموزشی کنترل حالت لغزشی تطبیقی برای ردیابی مسیر ربات متحرک با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.