شبیه سازی آموزشی کنترل لغزشی تطبیقی عصبی خودروی چند جهته در حضور عدم قطعیت با متلب
نکات برجسته
1. این مقاله یک روش جدید کنترل حالت لغزشی تطبیقی شبکه عصبی (NNASMC) را برای طراحی کنترلکننده دینامیکی یک وسیله نقلیه همه جهته ارائه میکند.
2. مدل سازی سینماتیک و دینامیکی وسیله نقلیه همه جهته با عدم قطعیت ها و اختلالات خارجی ناشناخته ارائه شده است.
3. قانون تطبیقی مبتنی بر شبکه عصبی مصنوعی (ANN) برای مدلسازی و برآورد اختلالات مختلف عدم قطعیت معرفی شده است.
4. عملکرد روش NNASMC پیشنهادی از طریق شبیهسازیهای رایانهای و آزمایشهای فیزیکی بر روی شکل گیاه خودروی همهجهه تأیید میشود.
5. نتایج اثربخشی و استحکام روش NNASMC را در حضور عدم قطعیت ها و اختلالات خارجی ناشناخته تأیید می کند.
چکیده مقاله (ترجمه ماشینی)
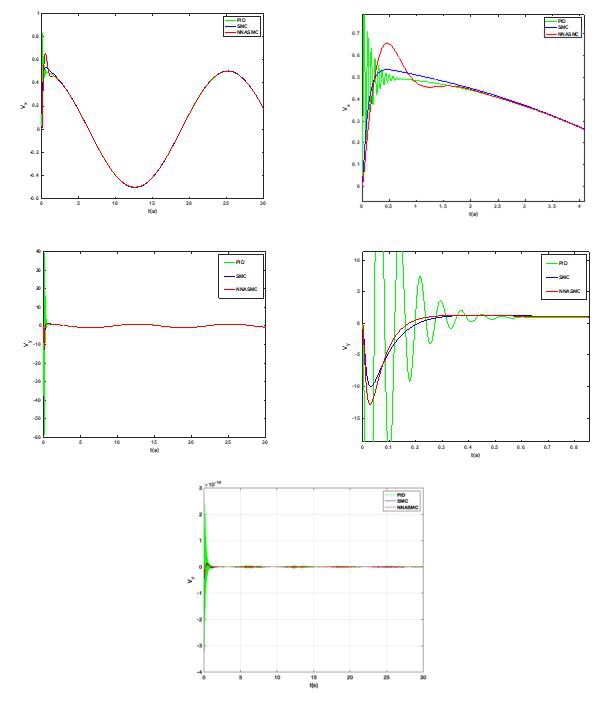
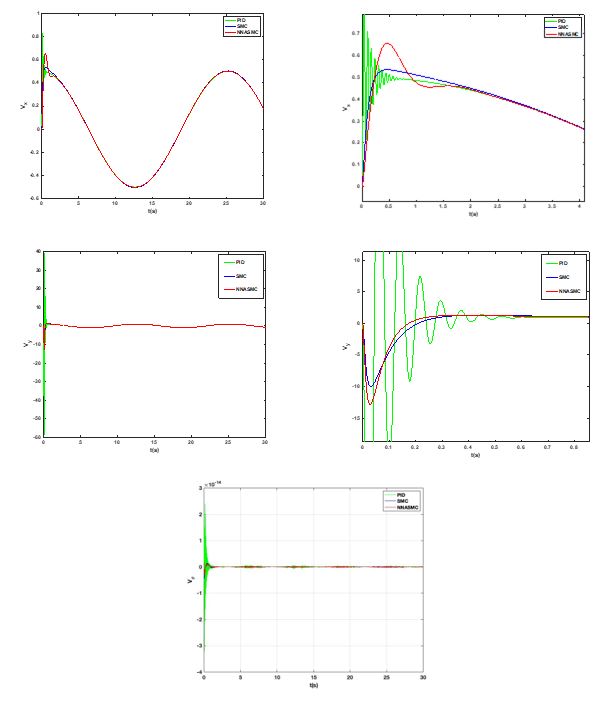
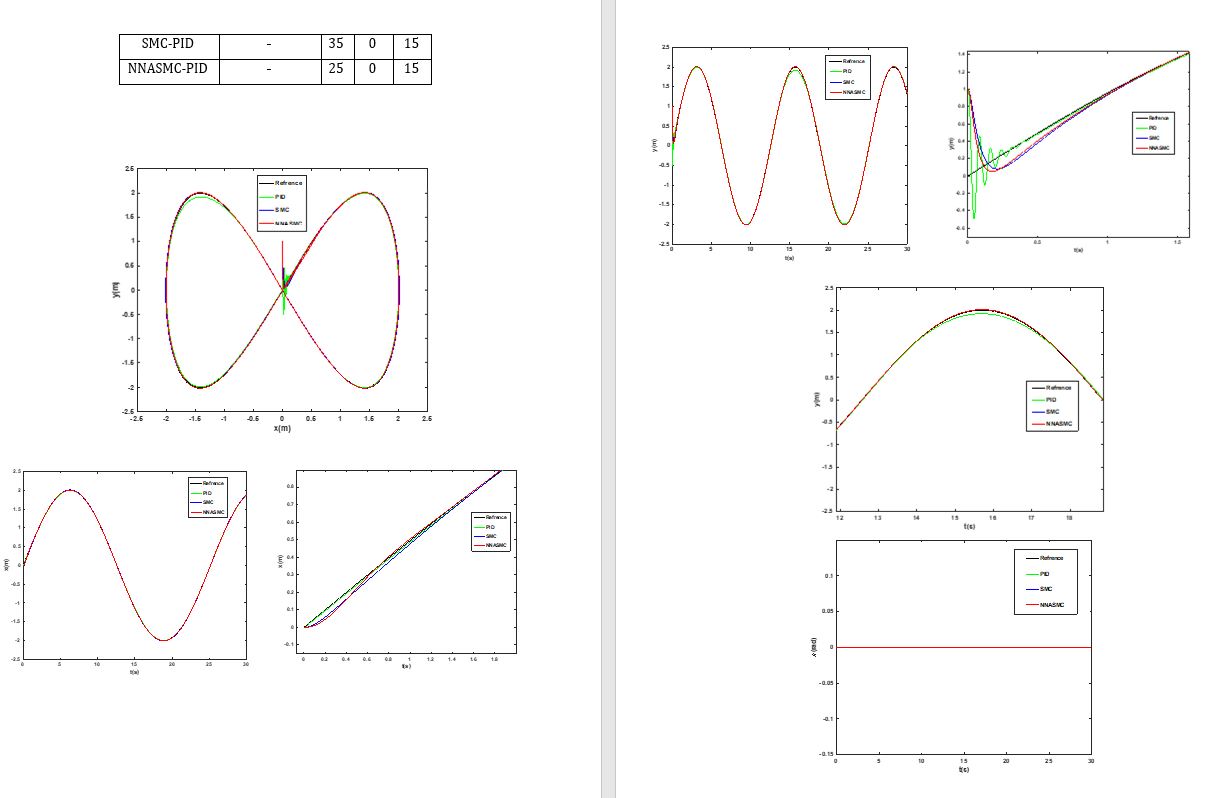
این مقاله یک روش جدید کنترل حالت لغزشی تطبیقی شبکه عصبی (NNASMC) را برای طراحی سیستم کنترل پویا برای یک وسیله نقلیه همه جهته ارائه میکند. این وسیله نقلیه همه جهته مجهز به چهار چرخ Mecanum است که توسط موتورهای جداگانه به حرکت در میآیند و در نتیجه دارای تحرک همه جانبه و توانایی ورزشی عالی در فضای باریک است. با در نظر گرفتن عدم قطعیت های مختلف و اختلالات خارجی ناشناخته، مدل های سینماتیکی و دینامیکی خودروی همه جهته ایجاد می شود. کنترل کننده حلقه داخلی بر اساس روش کنترل حالت لغزشی (SMC) طراحی شده است، در حالی که کنترل کننده حلقه بیرونی از روش مشتق انتگرال نسبت (PID) استفاده می کند. به منظور دستیابی به عملکرد پایدار و قوی، قانون تطبیقی مبتنی بر شبکه عصبی مصنوعی (ANN) برای مدلسازی و برآورد اختلالات مختلف عدم قطعیت معرفی شدهاست. پایداری و استحکام روش کنترل پیشنهادی با استفاده از تئوری لیاپوف تحلیل میشود. عملکرد روش NNASMC پیشنهادی تایید شده و با کنترلکننده PID کلاسیک و کنترلکننده SMC از طریق شبیهسازی کامپیوتری و آزمایش پلت فرم مقایسه میشود. نتایج اثربخشی و استحکام روش NNASMC را در حضور عدم قطعیت ها و اختلالات خارجی ناشناخته تأیید می کند.
کلمات کلیدی: وسیله نقلیه همه جهته، کنترل حالت لغزشی، چرخ Mecanum، شبکه عصبی مصنوعی.
1. مقدمه
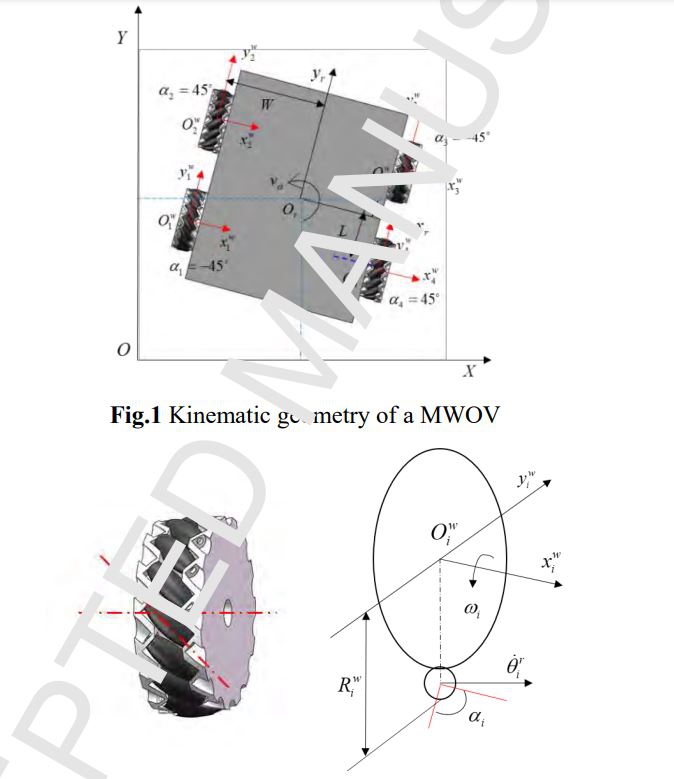
وسایل نقلیه همه جهته می توانند حرکت انتقالی و چرخشی را به طور مستقل و همزمان انجام دهند. از این رو، وسایل نقلیه همه جانبه در مناسبتهای مختلف، بهویژه وسایل نقلیه در فضاهای باریک، مانند بیمارستانها، کارخانهها و کارگاههای سرپناه برای افراد معلول، بهطور گسترده مورد استفاده قرار میگیرند. وسایل نقلیه همه جهته چرخ Mecanum (MWOV) نمونه معمولی از وسایل نقلیه متحرک با قابلیت همه جهته است [1-3]. چرخ Mecanum متشکل از یک سری غلتک غیرفعال است که با زاویه 45 درجه در اطراف محیط توپی آن نصب می شود، نوع خاصی از چرخ ها است که می تواند حرکت جانبی را بدون تغییر نگرش خود چرخ امکان پذیر کند [4-7]. با توجه به ویژگی جانبی چرخهای Mecanum، MWOV میتواند به هر موقعیتی بدون تغییر جهت حرکت کند، که با وسایل نقلیه معمولی متفاوت است. به طور خاص، MWOV دارای انعطافپذیری و مانورپذیری فوقالعادهای در حرکت در فضای کاری باریک است، و بنابراین، به طور موثر و کارآمد در کارخانههای مرتبسازی لجستیک، رباتهای فوتبال، بیمارستانها، نظامی، برنامههای کاربردی خانگی و غیره به کار گرفته شده است [8-10] . تحقیقات در مورد MWOV ها در سراسر جهان بسیار محبوب است، به ویژه خودرویی که به چهار چرخ Mecanum مجهز شده است [1-3] [11-12]. در خودروی چهار چرخ Mecanum، چهار چرخ به صورت متقارن در مرکز هندسی خودرو قرار گرفته اند و چهار موتور مجزا به ترتیب چهار چرخ را به حرکت در می آورند. با توجه به هماهنگی و همکاری چهار موتور مجزا و همچنین عدم قطعیت های مختلف در دنیای واقعی، کنترل حرکت با دقت بالا MWOV یک موضوع چالش برانگیز برای محققان است. الگوریتمهای کنترلی مختلفی [13-19] برای کنترل حرکت ربات در دهههای گذشته اعمال شد، از جمله کنترل حالت لغزشی (SMC)، کنترل قوی، کنترل تطبیقی، کنترل مبتنی بر ناظر اختلالات و غیره. چن و همکاران [13] یک کنترلکننده دینامیکی حالت لغزشی تطبیقی برای تثبیت مجانبی ربات متحرک غیرهولونومیک به یک مسیر مورد نظر بدون در نظر گرفتن عدم قطعیتها ارائه کرد. میائو و همکاران [14] یک کنترلکننده شبکه عصبی تطبیقی جدید برای ردیابی مسیر وسیله نقلیه زیرآبی خودگردان پیشنهاد کرد که از شبکه عصبی تابع پایه شعاعی برای محاسبه خطاهای مدلسازی استفاده میکند. کیم و همکاران [15] یک کنترل کننده تطبیقی قوی برای غلبه بر عدم قطعیت ها و اختلالات خارجی برای ربات متحرک تحت محدودیت های غیرهولونومیک طراحی کرد که می تواند به ردیابی سرعت کامل دست یابد. پوروین و آندریا [16] الگوریتمی را برای ایجاد یک مسیر و کنترل بهینه برای وسایل نقلیه همه جهته چهار چرخ تحت شرایط اصطکاک محدود پیشنهاد کردند. با این حال، اکثر روشهای کنترلی فوق به دقت مدلسازی خودرو بستگی دارد و بنابراین نمیتوان کنترل رضایتبخشی بر عدم قطعیتهای مدل و اغتشاشات خارجی ناشناخته بهویژه در خودروی چرخدار Mecanum داشت.
بخشی از فایل آموزشی
این مقاله با استفاده از کنترل مد لغزشی به همراه شبکههای عصبی با قانون تطبیق برای تخمین عدم قطعیت، خودروهای چند جهته را کنترل مینماید. برای این منظور از دو حلقه کنترل خارجی و داخلی استفاده شده است.
حلقه داخلی با استفاده از کنترل مد لغزشی و حلقه خارجی با استفاده از کنترلر PID طراحی شده است. به منظور بدست آوردن عملکردی مقاوم در مقابل عدم قطعیتها و اغتشاشات از یک شبکه عصبی که ضرایب آن بهطور تطبیقی به روزرسانی میشوند تا این غیر ایدهآل ها را تخمین بزنند ، استفاده شده است.
برای دو ورژن متلب 2019b و 2017a شبیهسازی ها داده شده است و در دو فولدر جدا قرار گرفته شده اند
برای اجرای پروژه در هر فولدر دو فایل trajectory1.m و trajectory2.m وجود دارد.
برای شبیه سازی مسیر اول trajectory1.m و برای شبیه سازی مسیر دوم trajectory2.m را اجرا کنید.
بسیاری از پارامترهای کنترل کننده در مقاله ذکر نشده بود که با شبیه سازی های فراوان بدست آمد. نتایج از نتایج مقاله بسیار بهتر میباشد
شبیه سازی آموزشی کنترل لغزشی تطبیقی عصبی خودروی چند جهته در حضور عدم قطعیت با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






نقد و بررسیها
هنوز بررسیای ثبت نشده است.