توضیحات
عنوان فارسی: بررسی کنترل سرعت موتورهای dc
موتورهای DC از جمله موتور جاروبک دار[1] ضریب گشتاوری بزرگی، ظرفیت بالای تحمل اضافه بار و مزایای تحقق پذیری بالایی دارند و به طور گسترده در کنترل ردیابی ربات های حرکتی چرخ دار و ربات های پرنده و به طور کلی ربات های حرکتی استفاده می شود. سیستم هدایت کنترل موتور DC بدنه اجرایی موتور متحرک است و سیستم کنترل موتور نقش اساسی در کنترل سریع و هموار عملکرد سیستم ربات دارد. عملکرد ردیابی سرعت موتور هدایت کننده به صورت مستقیم روی نحوه ردیابی حرکت ربات اثر می گذارد. در نتیجه، به موتور هدایتی برای ردیابی سرعت زاویه ای مطلوب نیاز است تا ردیابی با دقت بالا و با سرعت مناسب به دست آید. این موضوع را نیاز باید در نظر داشت که زمانیکه یک موتور DC جاروبک دار در سرعت پایین زاویه ای حرکت می کند، این موضوع جابه جایی هایی را ایجاد می کند که به علت گشتاور اصطحکاکی پدیده ای هموار نیست. در صورت وجود گشتاور اصطحکاکی امکان ایجاد خطای حالت ماندگار و نوسانات چرخه حدی وجود دارد [1] [2]. اثرات گشتاور اصطحکاکی روی عملکرد دینامیکی سیستم یک توزیع موج شکلی را در طول نقطه صفر در سرعت زاویه ای پایین نشان می دهد.
موتورهای DC جاروبک دار یک موتور مغناطیس دائم است که به همراه مطالعه ی ابزارهای میکروالکترونیکی و تجهیزات الکترونیک قدرت بررسی و مطالعه می شوند. در واقع این موضوع می تواند به عنوان یک مطالعه موردی درمورد سیستم های کنترل موتور در نظر گرفته شود، ارتباطات موتورهای جاروبک دار از طریق یک مدار الکترونیکی خارجی ایجاد و ساخته می شود. در اثر عدم ارتباط با جریان متناوب برق این موتور ها تولید جرقه را کاهش می دهند و همچنین به شکل قابل توجهی تلفات و نویز های موتوری را کاهش می دهند. سیستم کنترل سرعت موتور DC جاروبک دار مغناطیس دائم یک سیستم غیرخطی، چند متغیره و متغیر با زمان است و مقداردهی پارامترها به سختی صورت می گیرد، یک مجموعه خوب از پارامترهای مقدار دهی شده تنها در یک مقیاس کوچک است که اثر کنترلی بهتری دارند. زمانیکه پارامترهای مقدار دهی شده از محدوده مشخصی بزرگتر می شوند و تغییر می کنند، اثرات کنترل کننده نامناسب و بد می شود و در نتیجه با استفاده از کنترل کننده PID رایج به سختی می توان نیازمندی ها و خواسته های کنترلی را برطرف ساخت.
در مقاله [3] یک طرح کنترلی بدون نیاز به سنسور و ارتقاء یافته برای موتورهای DC با جاروبک ارائه گردیده است. یک رویت گر مدلغزشی SMO سرعت بالا[2] برای تخمین نیروی ضد محرکه [3] (back-EMF) به کار گرفته شده است. در این تحقیق یک الگوریتم کنترلی سرعت برای سیستم کنترل BLDC ارائه شده است، روش ارائه شده ترکیبی از کنترل کننده مدلغزشی و رویت گر اغتشاش[4] (DOB) است که از آن برای جلوگیری از نوسانات سرعت ناشی از تغییرات ناگهانی بار گشتاوری استفاده می شود. از DOB برای تخمین بار گشتاوری و تولید یک سیگنال فیدبک جبرانسازی برای کنترل کننده استفاده می شود. بنابراین درواقع از DOB به عنوان یک جبرانساز کنترل کننده استفاده می شود. رابطه ی زیر نشان دهنده ی رویت گر مد لغزشی است:

که در رابطه بالا روابط زیر برقرار است:

رابطه قانون کنترل مد لغزشی برای کنترل سرعت نیز به شکل زیر است:

در روش SMO ارائه شده یک تابع سوئیچینگ S شکل هلالی[5] و یک قانون رسیدن مجانبی با هم تطبیق شده و بهره آن می تواند از روی سرعت مرجع تنظیم گردد. بنابراین به نوعی بهره سیگنال کنترل سوئیچینگ تطبیقی می باشد. نتایج شبیه سازی این روش ترکیبی نشان می دهد که روش ارائه شده نسبت به روش رایج SMO بهتر بوده و نتایج تخمین و ردیابی سیستم را بهبود می دهد همچنین نتایج شبیه سازی سرعت نشان می دهد که نوسانات کمتری در سرعت موتور براساس تغییرات بار ایجاد گردیده است که سبب افزایش عمر موتور و در نهایت عملکرد موثرتر آن می شود.

هرگونه فرآیند عیب یابی و برطرف کردن عیب در سیستم های کنترل باید سریع و کارآمد باشد. در حضور نویز و ورودی غیرخطی، فرآیند مربوط به عیب و خطا می تواند هشدار[6] خطا تولید کند. مقاله ی [4] روی فرآیند شناسایی خطا، جداسازی و شناسایی آن تمرکز کرده است. همانطور که می دانیم زمانیکه یک خطا به وقوع می پیوندد، سنسورهای موتور DC در محیط پر از اغتشاش کار می کنند. روش و تکنیکی که برای حل این مشکل انتخاب می شود باید بتواند دو مشکل و مسئله را حل کند یا در نظر بگیرد از جمله: نویز و ورودی های غیرخطی. در این پژوهش از شبکه عصبی مصنوعی[7] برای حل این مشکل و تولید یک سیگنال مقاومت استفاده شده است، و در نتیجه ی آن هشدارها خطا کاهش می یابد. همانطور که می دانیم خطا ممکن است در هر سیستمی رخ دهد و در نتیجه ی آن ممکن است سنسورهای استفاده شده برای جمع آوری ورودی های کنترل دچار خطا شوند و سیستم کنترل قادر نباشد که بیشتر از این سرعت موتور را کنترل کند. از آنجایی که این خطا ها و خرابی در موارد زیادی اتفاق می افتد به منظور جلوگیری از این اتفاق و توقف و همچنین به منظور تضمین پیوستگی عملکرد کنترل سیستم در حالت اجرایی، استقاده از الگوریتم آشکارسازی خطا، شناسایی و جداسازی آن بسیار ضروری است. الگوریتم شناسایی خطا و جداسازی آن در بلوک دیاگرام زیر آمده است:

در این پژوهش پس از مدلسازی موتور، الگوریتم FDII [8] توصیف و فرمول سازی شده است. در این روش دو خروجی از طریق دو شبکه عصبی سه لایه تولید می شود، ورودی های شبکه عصبی اول ولتاژ و جریان اندازه گیری شده و ورودی های شبکه عصبی دوم ولتاژ و فرکانس هستند که به کمک این ورودی ها تمام مشخصه های سیستم کنترل قابل تحلیل و اندازه گیری است و خروجی و یا مانده این شبکه میزان نوسانات بزرگ مربوط به این ورودی ها را آشکار می کند. شکل شبکه عصبی به کار گرفته شده در این پژوهش به شکل زیر است:
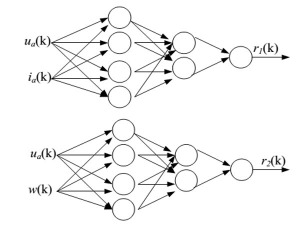
همانطور که در بلوک دیاگرام اول هم مشخص است بعد از محاسبه خروجی های شبکه عصبی سیستم کنترل کننده با بررسی دامنه و فرکانس این مقادیر مانده مشخص می کند که سیستم در حالت عملکردی سالم است یا به باید به مد و حالت جداسازی برود. در حالت عملکردی سالم این دو مقدار مانده تقریباً صفر هستند وهشدار مربوط به آن ها باید در حالت خاموش باشد و در حالت وقوع خطا از روی دامنه این مانده ها می توان نوع خطا و هشدار مرتبط با آن را مشخص کرد. این عملکرد مانده ها به شکل زیر مشخص می گردد:

نتایج شبیه سازی در این مقاله عملکرد سریع و کارآمدی در شناسایی خطا را نشان می دهد. از جمله معایب این روش این است که به حجم محاسابات نسبتاً سنگینی برای شبکه های عصبی نیاز است و کنترل کننده ای که بتواند همزمان با این خطا در حالت عملیاتی کار کند شبیه سازی نشده است.
در پژوهش [5] یک مطالعه پژوهشی برای مقدار دهی بهینه پارامترهای کنترل کننده PI و PID ارائه شده است. برای سیستم هدایت مستقیم جریان از روش های بهینه سازی حرکت دسته جمعی ذرات[9] (پرندگان) PSO ، روش زیگلر نیکولز[10] (ZN) و روش بهبودی یافته زیگلر نیکولز (Modified ZN) استفاده شده است. هدف اصلی این پژوهش کاهش و حداقل سازی مشخصه های پاسخ حالت گذار مانند زمان صعود، زمان نشست و فراجهش برای بهتر ساختن پاسخ سرعت موتور DC است. کنترل سرعت موتور DC با استفاده از روش های کنترل PI و PID انجام می شود.
توجه:
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا استفاده فرمایید.
- لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش تحقیق مرتبط با رشته تخصصی خود بر روی کلید زیر کلیک نمایید.
سفارش تحقیق





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.