توضیحات
عنوان فارسی: یک مدل جدید برای کنترل سیستم با اصطکاک
عنوان انگلیسی مقاله:
A New Model for Control of Systems with Friction
چکیده :
در این مقاله ما یک مدل دینامیک برای اصطکاک پیشنهاد کردیم. مدل عمده رفتار اصطکاکی که به طور تجربی مشاهده شده است را در بر دارد. این مدل شامل اثر Stribeck، پسماند، ویژگی های ارتجاعی برای اصطکاک و تغییر نیروی شکست است. خواص مدل که مربوط به طراحی کنترل است، با تحلیل ها و شبیه سازی بررسی شده است. استراتژی های کنترل جدید، شامل یک ناظر اصطکاک، بررسی شده و نتایج پایداری ارائه شده است.
معرفی :
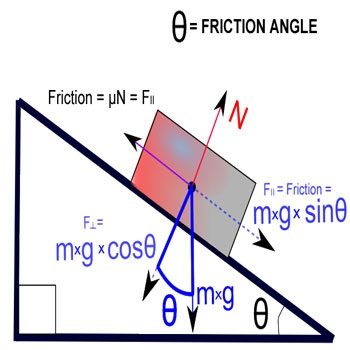
اصطکاک یک جنبه مهم از بسیاری از سیستم های کنترل برای هردوی مکانیسم های با کیفیت بالای فرمان یار[1] و سیستم های ساده بادی و هیدرولیکی است. اصطکاک می تواند منجر به خطاهای ردیابی، چرخه های محدود و حرکت ناخواسته لغزشی- چسبندگی شود. استراتژی های کنترل که در تلاش جبران اثرات اصطکاک هستند، بدون توسل به حلقه های کنترل با بهره بالا، ذاتاً نیاز به یک مدل مناسب اصطکاکی برای پیش بینی و جبران اصطکاک دارند. بنابراین، انواع برنامه ها، روش های جبران اصطکاک بر پایه مدل (مدل محور) نامیده می شود. یک مدل خوب اصطکاک نیز برای تحلیل پایداری، پیش بینی چرخش های حد، یافتن بهره های کنترلر، انجام شبیه سازی و غیره الزامی است. اغلب روش های جبران اصطکاک مدل محور موجود از مدل های اصطکاک کلاسیک از قبیل اصطکاک کولن و ویسکوز استفاده می کنند. در کاربردهای با موقعیت های بسیار دقیق و ردیابی با سرعت کم، نتایج همواره رضایت بخش نیست. یک توصیف بهتر از پدیده های اصطکاک برای ویسکوزیته های کم و به ویژه زمانی که تلافی کردن سرعت صفر الزامی است، می باشد. اصطکاک یک پدیده طبیعی است که به سختی مدل می شود و هنوز کاملاً درک نشده است. مدل های اصطکاک کلاسیک مورد استفاده با نقشه های ایستایی بین سرعت و نیروی اصطکاک توصیف می شود. نمونه های تولید یک اثر بی ثبات کننده در سرعت های بسیار پایین شناخته شده است. مدل های کلاسیک نه رفتار تشنجی ( هیجانی) زمانی که که اصطکاک برای سرعت های ناپایدار بررسی می شود و نه تغییرات در نیروی شکست با شرایط آزمایشگاهی و نه جابه جایی های کوچک که در فصل مشترک تماس در طول اصطکاک رخ می دهد، را توضیح نمی دهد. مورد دوم به مقدار زیادی شبیه به ارتباط یک فنر سفت با تعدیل کننده است و گاهی اوقات به عنوان اثر Dahl مطرح می شود. مطالعات بعدی ( به عنوان مثال [1] و [2] را ببینید) نشان می دهند که یک مدل اصطکاک شامل دینامیک برای توصیف دقیق پدیده اصطکاک، الزامی است. یک مدل دینامیک را که رفتار فنر گونه در حین اصطکاک توصیف می کند توسط Dahl بیان شد. [3] مدل Dahl الزاماً اصطکاک کولن به همراه یک تأخیر در تغییر نیروی اصطکاک است زمانی که جهت جرکت تغییر می کند. مدل دارای ویژگی های خوب بسیاری است و همچنین از لحاظ تئوری به خوبی قابل فهم است. مسائلی مانند وجود و منحصر به فرد بودن راه حل ها و اثرات پسماند در یک مقاله جالب توسط Bliman [4] مورد بررسی قرار گرفته است. مدل Dahl، با این حال شامل اثر Stribeck نیست. تلاش برای وارد کردن این مورد در مدل Dahl صورت گرفته است. [5] در جایی که نویسندگان یک مدل مرتبه دوم Dahl با استفاده از توصیفات یکسان فضای خطی معرفی کردند. اثر Stribeck در این مدل تنها گذرا است، اما، پس از برگشت سرعت و در مشخصات اصطکاک حالت پایدار وجود ندارد. مدل Dahl برای جبران اصطکاک تطبیقی [6] ، [7] با عملکرد بهبود یافته به عنوان نتیجه به کار می رود. همچنین مدل های دیگری برای اصطکاک دینامیک وجود دارد . Armstrong – Hclouvry یک مدل هفت پارامتری پیشنهاد کردند، [1] این مدل، پدیده های اصطکاک متفاوت را ترکیب نمی کند اما در واقع یک مدل برای اصطکاک و دیگری برای اصطکاک کشویی است. مدل دینامیک دیگر پیشنهادی توسط Rice و Ruina [8] در ارتباط با کنترل توسط Dupont استفاده شده است. [9] این مدل در سرعت صفر تعریف نشده است. در این مقاله ما یک مدل اصطکاک دینامیک جدید پیشنهاد کردیم که رفتار اصطکاک را ترکیب می کند، یعنی، اثر Dahl، با مشخصات قراردادی اصطکاک حالت پایدار که شامل اثر Stribeck می باشد. ما همچنین نشان دادیم که این مدل برای عملکردهای مختلف کنترلی مفید است.
[1] servo
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا اقدام فرمایید.
- پس از خرید بلافاصله لینک دانلود فایل برای شما ایمیل خواهد شد.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.