





توضیحات
کدنویسی و شبیه سازی کنترل کننده چند متغیره با روش پسگام با نرم افزار متلب
یکی از اساسی ترین حرکت های سیستم های پرنده عمودپرواز توانایی معلق ماندن در هوا می باشد که آن را از دیگر سیستم های پرنده متمایز می کند
درجات آزادی
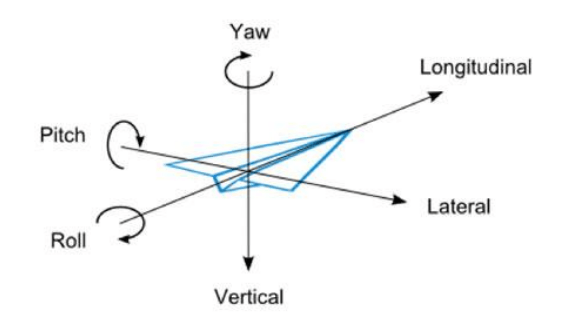
در حالت کلی می توان پرنده را در فضا به صورت یک جسم کاملا آزاد در نظر گرفت (حالتی که کل پرنده را یک جسم صلب در نظر بگیریم) و به این ترتیب ۶ درجه آزادی را برای آن تعریف می شود تا با استفاده از آنها بتوان مکان و وضعیت پرنده را به طور کامل توصیف نمود، در شکل های زیر این درجات آزادی را مشاهده می کنید و نکته مهمی که در این جا ذكر آن ضروری به نظر می رسد این است که دستگاه مختصات برای هرحالت و هر کاربردی که در نظر گرفته می شود دستگاه راست گرد بوده و همچنین برای هر کاربردی در علوم مختلف حالت قرار گیری دستگاه مختصات محلی که برای اجسام تعریف می کنند متفاوت است.
سیستم مختصات تحليل
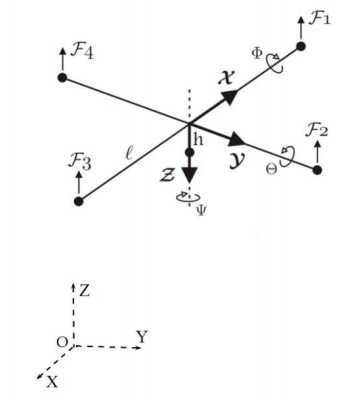
اولین قدم در تحلیل دینامیکی یک سیستم فیزیکی تعریف درست و دقیق دستگاه مختصات مناسب برای جسم است تا بتوان تمام حرکات جسم را با آن سنجید و تحلیل نمود. در حالت استاندارد ۴ دستگاه مختصات برای توصیف وضعیت یک جسم در فضا وجود دارد ولی بهترین و همچنین ساده ترین سیستمی که با می توان کار کرد سیستم مختصات دکارتی است، به همین منظور دو سیستم مختصات را برای کار خود چنین تعریف می کنیم.

چکیده
این مقاله پیشرفت و توسعه یک ساختار شبیه سازی شده چهار روتو ر غیرخطی را به همراه یک کنترلر غیر خطی ارائه می کند.
مشکلات پایداری و هدایت چهار روتور توسط معماری حلقه های کنترل تو در تو حل می شود.یک کنترلر غیر خط ی
پسگام ) backstepping (برای پایداری حلقه داخلی اجرا می شود.این)کنترلر(وضعیت مرجع ،ارتفاع و مسیر حرکت
هواپیما را بطور مجانبی ردیابی می کند.کنترلر حلقه خارجی مسیرهای مرجع را برای کنترل حلقه داخلی ایجاد می کند تا بدین وسیله به ایستگاههای هوائی مطلوب برسد.برای تضمین محدوده مسیرهای مرجع یک کنترلر pd با عملکرد در ناحیه اشباع برای حلقه خارجی بکار می رود.به علت پیچیدگی موجود در آزمایش و توسعه کنترلر،یک ساختار شبیه سازی ایجاد شد.این ساختار بر پایه شبیه سازی رباتیک بدن ه سه بعدی و برنامه دینامیکهای موتور) ODE ( می باشد.
:Open Dynamics Engine(ODE) این برنامه بکار میرود برای شبیه سازی تعاملات پویا ی بین اجسام در فضا؛مثلا
سیلندر با نیمکره دربسته در محیط و… این ساختارمی تواند توسعه و درستی کنترلرها را خیلی آسانتر کند.این ساختار منتشر شده است و در بدنه شبیه ساز چهار روتور موجوداست.
کدنویسی و شبیه سازی کنترل کننده چند متغیره با روش پسگام با نرم افزار متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.