



توضیحات
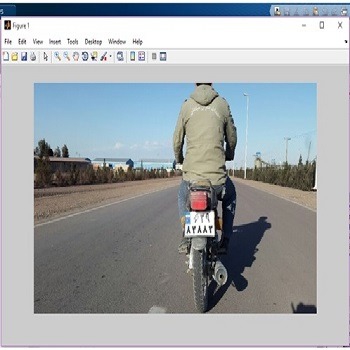
پروژه مدل سازی کنترل اتوماتیک پاندول و ارابه با متلب
ﻣﺪل ﺳﺎزي
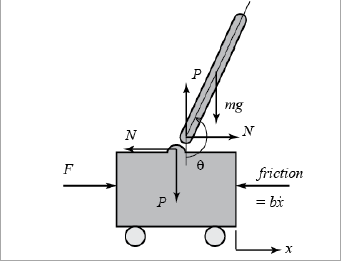
سیستم زﯾـﺮ را در ﻧﻈـﺮ گرفته ایم . ﺟـﺮم ﭘﺎﻧــﺪول m ﻃـﻮل آن l و ﺟـﺮم اراﺑـﻪ M اﺳـﺖ. ﻧﯿـﺮوي اﻓﻘـﯽ F ﺑﺎﻋــﺚ ﺣﺮﮐﺖ ﺟﺮم M و در ﻧﺘﯿﺠﻪ ﺑﺎﻋﺚ ﺗﻌﺎدل ﭘﺎﻧﺪول ﻣﻌﮑﻮس ﻣﯿﺸﻮد. در اﯾﻦ ﺳﯿﺴﺘﻢ ﻓـﺮض شده اﺻـﻄﮑﺎك راﺑﻄـﻪ ي ﻣﺴـﺘﻘﯿﻢ ﺑـﺎ ﺳﺮﻋﺖ ﺣﺮﮐﺖ اراﺑﻪ دارد و در ﺧﻼف ﺟﻬﺖ ﺣﺮﮐﺖ ﺑـﻪ اراﺑـﻪ وارد ﻣﯿﺸـﻮد. ﻣﻌـﺎدﻻت دﯾﻨـﺎﻣﯿﮑﯽ ﺣـﺎﮐﻢ ﺑـﺮ اﯾـﻦ ﺳﯿﺴـﺘﻢ را ﺑـﻪ روش ﻧﯿﻮﺗﻦ ﯾﺎ ﻻﮔﺮاﻧﮋ اﺳﺘﺨﺮاج کرده ایم و آﻧﺮا ﺣﻮل ﻧﻘﻄﻪ ﺗﻌﺎدل 180 =θ ﺧﻄﯽ ﺳﺎزي کرده ایم.
ﻧﮑﺘﻪ: در اﯾﻦ ﺑﺨﺶ ﺑﺮاي راﺣﺘﯽ ﮐﺎر ﻣﻌـﺎدﻻت دﯾﻨـﺎﻣﯿﮑﯽ ﺳﯿﺴـﺘﻢ داده ﺷـﺪه اﺳـﺖ.
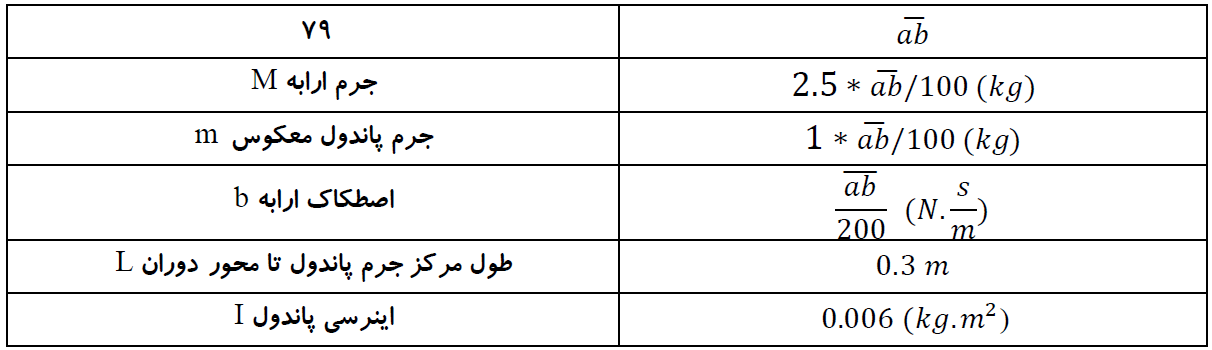
ﭘﺎراﻣﺘﺮﻫﺎي ﺳﯿﺴﺘﻢ
ﺑﺮاي اﻧﺠﺎم ﺷﺒﯿﻪﺳﺎزي ﻫﺎ ﭘﺎراﻣﺘﺮﻫﺎي زﯾﺮ را ﺑﺮاي ﺳﯿﺴﺘﻢ در ﻧﻈﺮ گرفته ایم.
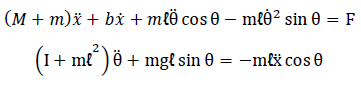
ﭘﺎﺳﺦ ﻧﻬﺎﯾﯽ:
ﻣﻌﺎدﻻت ﺣﺎﮐﻢ ﺑﺮ ﺳﯿﺴﺘﻢ
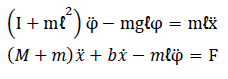
ﻣﻌﺎدﻻت ﺧﻄﯽ ﺳﺎزي ﺷﺪه( φ اﻧﺤﺮاف از ﺣﺎﻟﺖ ﺗﻌﺎدل اﺳﺖ):
1- ﺗﺎﺑﻊ ﺗﺒﺪﯾﻞ ﺳﯿﺴﺘم
ﺑﺎ در ﻧﻈﺮ ﮔﺮﻓﺘﻦ زاوﯾﻪي φ ﺑﻪ ﻋﻨﻮان ﺧﺮوﺟﯽ و ﻧﯿﺮوي F ﺑﻪ ﻋﻨﻮان ورودي ﺗﺎﺑﻊ ﺗﺒﺪﯾﻞ را ﺑﻪ دﺳﺖ آورده ایم.
2- ﻓﻀﺎي ﺣﺎﻟﺖ
ﺑﺎ در ﻧﻈﺮ ﮔﺮﻓﺘﻦ ﻣﻮﻗﻌﯿﺖ اراﺑـﻪ x و زاوﯾـﻪ ي ﭘﺎﻧـﺪول φ ﺑـﻪ ﻋﻨـﻮان ﺧﺮوﺟـﯽ و ﻧﯿـﺮوي F ﺑـﻪ ﻋﻨـﻮان ورودي ﻣﻌـﺎدﻻت ﻓﻀـﺎي ﺣﺎﻟﺖ ﺧﻄﯽ را نوشته ایم.
3- ﭘﺎﺳﺦ ﺳﯿﺴﺘﻢ ﺣﻠﻘﻪ ﺑﺎز
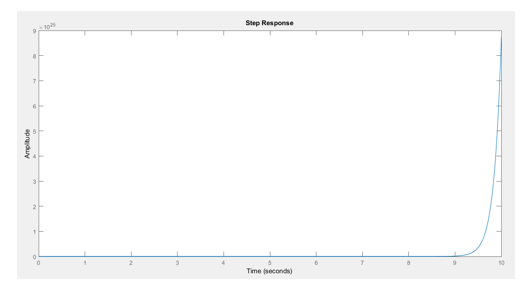
a) ﭘﺎﺳﺦ ﭘﻠﻪي ﺗﺎﺑﻊ ﺗﺒﺪﯾﻞ ﻗﺴﻤﺖ 1 ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﻮر step را رﺳﻢ کرده ایم.
b) ﭘﺎﺳﺦ ﺿﺮﺑﻪي ﺗﺎﺑﻊ ﺗﺒﺪﯾﻞ ﻗﺴﻤﺖ 1 را ﺑﺎ اﺳﺘﻔﺎده از دﺳﺘﻮر impulse رﺳﻢ کرده ایم.
c) در ﻣﻮرد ﭘﺎﯾﺪاري ﺳﯿﺴﺘﻢ ﺑﺤﺚشده.
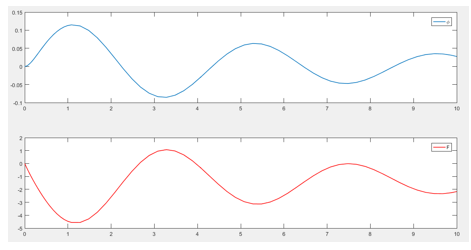
d) ورودي ﭘﻠﻪ ﺑﻪ اراﺑﻪ وارد کرده ایم و ﺑـﺎ اﺳـﺘﻔﺎده از ﻣﻌـﺎدﻻت ﻓﻀـﺎي ﺣﺎﻟـﺖ ﭘﺎﺳـﺦ ﺳﯿﺴـﺘﻢ را ﺑـﺎ اﺳـﺘﻔﺎده از دﺳـﺘﻮر lsim بدست اورده ایم.
4- ﻃﺮاﺣﯽ ﮐﻨﺘﺮﻟﺮ PID
ﺧﻮاﺳﺘﻪﻫﺎي ﻃﺮاﺣﯽ
ﻓﺮض ﺑﺮ اﯾﻦ اﺳﺖ ﮐﻪ ﺳﯿﺴﺘﻢ از ﺣﺎﻟﺖ ﺗﻌﺎدل ﺷﺮوع ﺑﻪ ﺣﺮﮐﺖ ﻣﯽﮐﻨﺪ.
ﻧﯿﺮوي ﺿﺮﺑﻪ ﺑﺮاﺑﺮ 1N ﺑﻪ ﺻﻮرت اﻏﺘﺸﺎش وارد ﻣﯿﺸﻮد.
ﭘﺎﻧﺪول و اراﺑﻪ ﺑﺎﯾﺪ ﺑﺎﯾﺪ در زﻣﺎن ﮐﻤﺘﺮ از 5sec ﺑﻪ وﺿﻌﯿﺖ ﻋﻤﻮدي ﺑﺮﮔﺮدﻧﺪ. settling time<5sec
ﭘﺎﻧﺪول ﻧﺒﺎﯾﺪ ﺑﯿﺸﺘﺮ از 0,35 رادﯾﺎن از وﺿﻌﯿﺖ ﻋﻤﻮدي ﻣﻨﺤﺮف ﺷﻮد. Overshoot<20deg
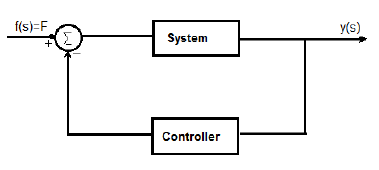
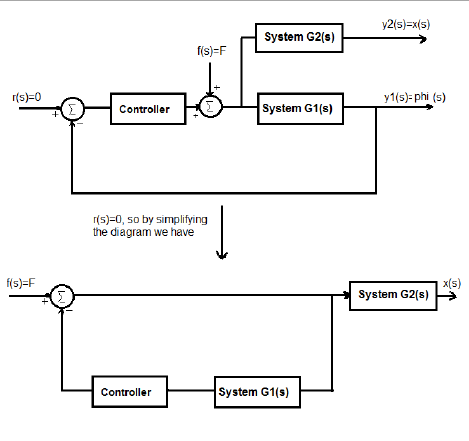
a) ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ اﯾﻨﮑﻪ ﻫﺪف در اﯾـﻦ ﻣﺴـﺌﻠﻪ ﺑﺎزﮔﺸـﺖ ﭘﺎﻧـﺪول ﺑـﻪ ﺣﺎﻟـﺖ اوﻟﯿـﻪ ﭘـﺲ از اﻋﻤـﺎل ﯾـﮏ اﻏﺘﺸـﺎش اﺳـﺖ ﭘـﺲ ﺳﯿﮕﻨﺎل ﻣﺮﺟﻊ ﺑﺮاي ردﯾﺎﺑﯽ ﺻﻔﺮ ﺧﻮاﻫﺪ ﺑﻮد ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ اﯾﻦ ﻧﮑﺘﻪ ﺑﻠـﻮك دﯾـﺎﮔﺮام ﺑـﺎ ﯾـﮏ ﮐﻨﺘـﺮل ﮐﻨﻨـﺪه ي PID ﺑـﻪ ﺻﻮرت ﺷﮑﻞ زﯾﺮ ﺧﻮاﻫﺪ ﺑﻮد. در اﯾﻦ ﺣﺎﻟﺖ ﻓﻘﻂ ﮐﻨﺘﺮل زاوﯾﻪ ﭘﺎﻧﺪول ﺑﻪ ﻋﻨﻮان ﺧﺮوﺟﯽ ﻣﺪ ﻧﻈﺮ اﺳﺖ.
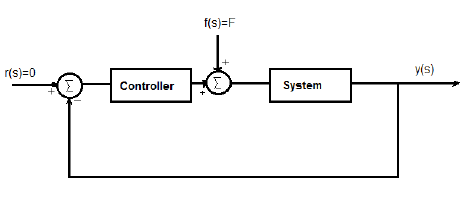
ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ اﯾﻨﮑﻪ ﺳﯿﮕﻨﺎل ﻣﺮﺟـﻊ ﺻـﻔﺮ اﺳـﺖ ﻣﯿﺘـﻮان اﯾـﻦ ﺳـﯿﮕﻨﺎل را از ﺑﻠـﻮك دﯾـﺎﮔﺮام ﺣـﺬف ﮐﺮد. ﻃـﯽ اﯾـﻦ روﻧـﺪ ﺑﻠﻮك دﯾﺎﮔﺮام ﺑﻪ ﺻﻮرت زﯾﺮ ﺧﻮاﻫﺪ ﺑﻮد. روﻧﺪ اﯾﻦ ﮐﺎر را ﺗﻮﺿﯿﺢ داﺪه ایم.
b) ﺑﺎ در ﻧﻈﺮ ﮔﺮﻓﺘﻦ ﭘﺎراﻣﺘﺮﻫﺎي زﯾﺮ ﺑﺮاي ﮐﻨﺘﺮل ﮐﻨﻨﺪه ﭘﺎﺳـﺦ ﺿـﺮﺑﻪ ي ﺳﯿﺴـﺘﻢ را ﺑﺪﺳـﺖ آورده ایم و در ﻣـﻮرد ﭘﺎﯾـﺪاري ﺳﯿﺴﺘﻢ ﺣﻠﻘﻪ ﺑﺴﺘﻪ ﺑﺤﺚ کرده ایم.
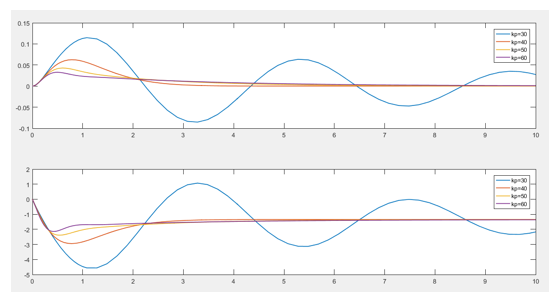
c) ﻣﻘﺪار Kp را اﻓﺰاﯾﺶ داده و در ﻣﻮرد اﺛﺮ آن ﺑﺮ ﭘﺎﺳﺦ ﺑﺤﺚ کرده ایم.
d) ﻣﻘﺪار Kd را اﻓﺰاﯾﺶ داده و در ﻣﻮرد اﺛﺮ آن ﺑﺮ ﭘﺎﺳﺦ ﺑﺤﺚ کرده ایم.
e) ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ ﺳﻮاﻟﻬﺎي ﻓﻮق ﺳﻌﯽ شده ﺧﻮاﺳﺘﻪﻫﺎي ﻃﺮاﺣﯽ ﺑﺮاي ﭘﺎﻧﺪول ﺑﺎ PID ﺑﺮ آورده کنیم.
f) ﻣﻘﺎدﯾﺮ زﯾﺮ را ﺑﺮاي ﮐﻨﺘﺮل ﮐﻨﻨﺪهي PID در ﻧﻈﺮ گرفته ایم و ﭘﺎﺳﺦ ﺿﺮﺑﻪي ﺳﯿﺴﺘﻢ را رﺳﻢ کرده ایم.
g)ﺑﺎ در ﻧﻈﺮ ﮔﺮﻓﺘﻦ ﻣﻮﻗﻌﯿﺖ ﺟﻌﺒﻪ را ﺑﻪ ﻋﻨﻮان ﯾﮑﯽ از ﺧﺮوﺟﯽﻫﺎي ﺳﯿﺴﺘﻢ، ﺑﻠـﻮك دﯾـﺎﮔﺮام ﺑـﻪ ﺻـﻮرت زﯾـﺮ ﺧﻮاﻫـﺪ ﺑﻮد. ﺑﺎ در ﻧﻈﺮ ﮔﺮﻓﺘﻦ ﮐﻨﺘﺮل ﮐﻨﻨﺪهﻫﺎي ﻗﺴﻤﺘﻬﺎي fوe ﻣﻮﻗﻌﯿـﺖ ﺟﻌﺒـﻪ را رﺳـﻢ کرده ایم. و بررسی کرده ایم که آﯾـﺎ ﮐﻨﺘـﺮل ﮐﻨﻨـﺪه ﻫـﺎي ﻓـﻮق ﻗﺎﺑﻞ ﭘﯿﺎده ﺳﺎزي در ﻋﻤﻞ ﺧﻮاﻫﻨﺪ ﺑﻮد ﯾﺎ ﺧﯿﺮ؟
بخشی از گزارش کار
بخش c. از پاسخ ضربه و پاسخ پله سیستم مشخص است که تابع تبدیل مورد نظر ناپایدار است. اما برای بحث علمی تر، قطب های تابع تبدیل را با استفاده از دستور pole در متلب بدست می آوریم.
همانطور که مشخص است این سیستم دارای یک قطب سمت راست است که باعث ناپایداری سیستم از هر نظر می شود.
بخش d. بعد از تعریف مقادیر پارامترها مانند قسمت قبل، ماتریس های حالت را مطابق قسمت 2 تشکیل می دهیم. و با دستور ss مدل فضای حالت آن را تشکیل می دهیم.

در بردار زمان را تعریف می کنیم و یک بردار ورودی هم اندازه با بردار زمان تشکیل می دهیم. و در نهایت با دستور lsim شبیه سازی را انجام می دهیم و پاسخ را دریافت می کنیم.
پروژه مدل سازی کنترل اتوماتیک پاندول و ارابه با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
-
سفارش پروژه متلب
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.