




توضیحات
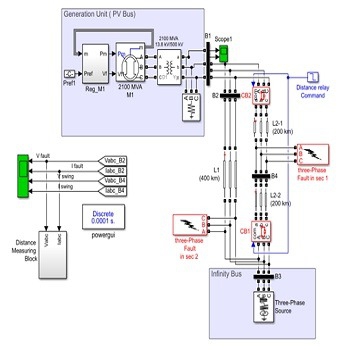
معادلات دیفرانسیل سیستم که در بخش قبل با جزئیات بیان شد، در دو حالت با و بدون پایدارساز در برنامه متلب پیاده میشود. برنامههای مربوطه با نامهای ذیل، ضمیمه پروژه نیز گردیده است.
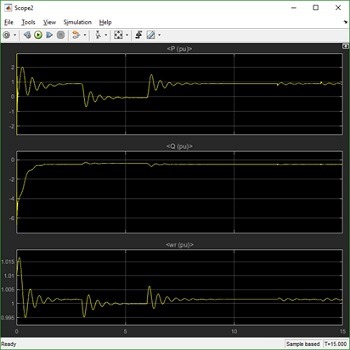
در لحظه T=1 sec، گشتاور مکانیکی ورودی به اندازه 10 درصد تغییر میکند و نمودار تغییرات Eq در شکل (2) مانیتور میشود. رفتار سیستم قدرت در گذر از یک نقطه کار به نقطه دیگر با نوساناتی همراه است که فرکانس و میرائی این نوسانات تابعی از نقطه کار و ساختار شبکه است. نوساناتی که در اثر تغییر نقطه کار در زاویه روتور ژنراتورهاي سنکرون شبکه رخ میدهد و داراي فرکانسی در حدود چند دهم هرتز تا چندین هرتز است را نوسانات فرکانس پائین مینامند، که در اکثر مواقع اینگونه نوسانات مربوط به مودهاي الکترومکانیکی مولدهاي شبکه است. در صورتیکه گشتاور میراکننده ژنراتور کافی نباشد، این نوسانات براي مدت طولانی موجود بوده و حتی تشدید میشوند و این امر باعث محدود شدن قابلیتهاي انتقال قدرت روي خط انتقال و ایجاد فشار روي شفت مکانیکی میشود. همانطور که از شکل (2) ملاحظه میگردد، در صورتی که ماشین سنکرون مجهز به پایدارساز نباشد، مقدار Eq با دامنههای افزایشی، رشد کرده و سیستم ناپایدار میشود. یک راهحل ممکن جهت افزایش پایداري در چنین شرایطی، ایجاد میرایی مثبت از طریق تولید گشتاور الکتریکی همفاز با انحراف سرعت روتور است. این وظیفه توسط پایدارساز سیستم قدرت (PSS) انجام میشود. نقش اصلی PSS، اضافه کردن میرایی به نوسانات روتور ژنراتور به وسیله کنترل سیستم تحریک (AVR) از طریق سیگنال پایدارساز کمکی است. همانطور که از شکل (2) ملاحظه میگردد، با مجهز شدن ماشین سنکرون به PSS، میرایی نوسانات Eq، افزایش یافته (میرایی مثبت) و ظرف چند ثانیه، تغییرات Eq به مقدار پایدار میرسد.
بخش هایی دیگر از گزارش کار نیز در گالری محصول موجود است.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.