

توضیحات
در این مدلسازی ترکیبی از سیمولینک و m فایل انجام شده است که جهت محاسبه pss نیازبه توابع و فانکشن های ضروری است.
پارامتر های ورودی با توجه به مثال کتاب کندور می باشد. که در فرمت زیر در نرم افزار فراخوانی شده است.
display(‘[vt0 p0 Q0 xq xqp xd xdp R x G B KA TA H Td0p f]’)
با توجه به این فراخوانی ماتریس ورودی شامل یک ماتریس 1*16 می باشد که با توجه به مثال بصورت زیر تکمیل شده است و به عنوان دیتای وروردی استفاده شده است.
[1 0.3 0.9 1.76 0.03 1.81 0.3 0.003 0.6 0.5 0 6.93 0.031 3.5 8 50]
حال با توجه به موارد موجود در کتاب دیتاها را تغییر دهید و این متن را کپی و در نرم افزار بخش dynamic وارد کنید.
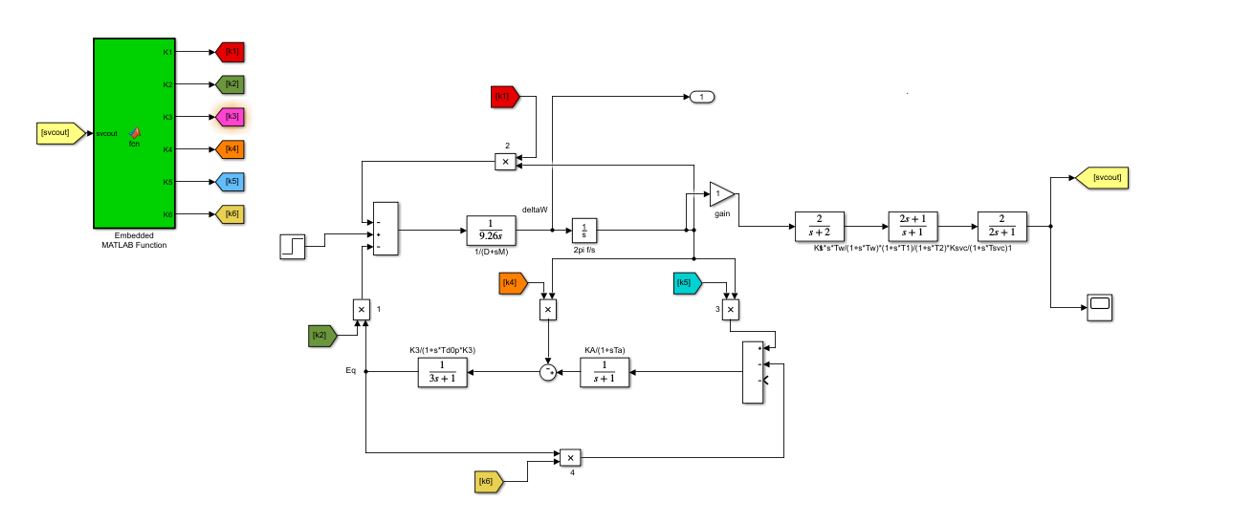
قسمت سیمولینک بصورت زیر می باشد:
بعد از این بخش کدهای قسمت dynamic را اجرا کنید.
که نرم افزار به شما تمامی مقادیر مجهول را ارائه می دهد و در صورت که سیستم ناپایدار باشد به شما اعلام می شود.
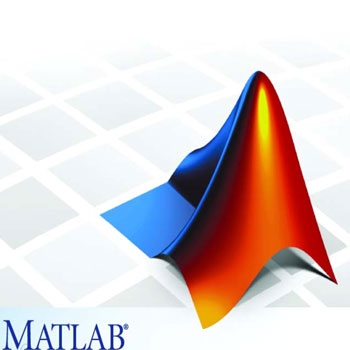
و از شما خواسته می شود ضرایب kesi , T2, T را وارد کنید تا متناسب با سیستم برای شما pss طراحی گردد و با توجه به سیستم تحریک و AVR این بار بجای ماتریس 4*4 مقادیر ویژه ماتریس 6*6 را محاسبه و در خروجی نشان می دهد.
و بعد از این طراحی و محاسبه ضرایب Kc و gain های pss این مقادیر را می توانید در فانکشن سیمولینک قرار دهید و به ازای تغییرات مختلف نتایج را ببنید.
و در نهایت در کد hasasiyat نیز با توجه به دیتاها آنالیز حساسیت برای شما انجام می شود و به ازای هر تغییر در وردی نتایج و شکل های خروجی تغییر خواهد کرد.
پاسخ بخش های مختلف گزارش کار بصورت زیر می باشد:
دیتای ورودی به نرم افزار بصورت زیر می باشد:
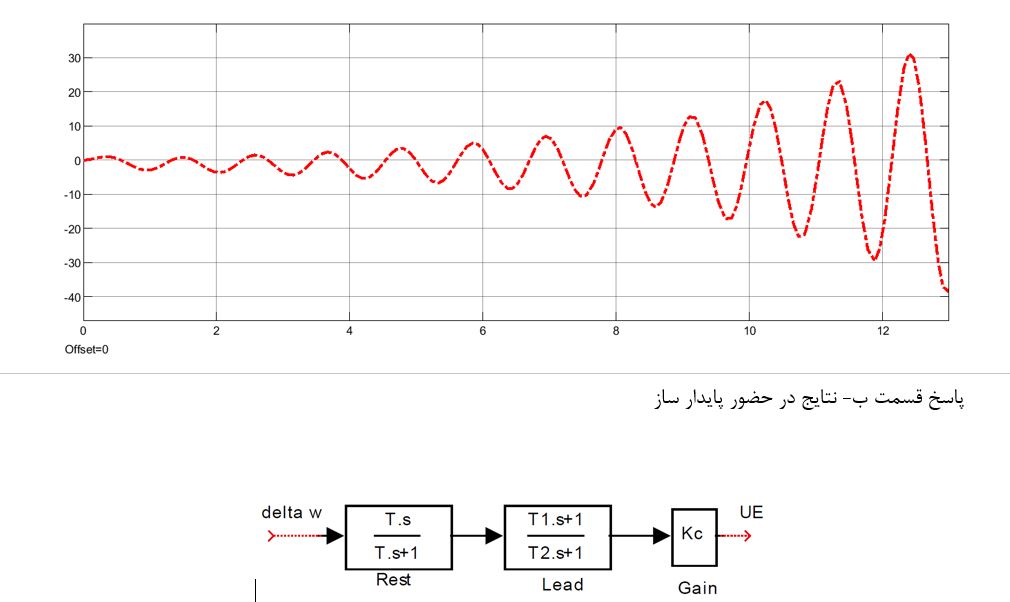
پاسخ بخش الف- بدون پایدارساز
نتایج خروجی در شکل زیر قابل مشاهده است که که با توجه به داده های مساله 12-3 کتاب کندور خروجی ها بصورت زیر می باشد:
نتایج خروجی زاویه رتور بصورت زیر می باشد و کاملا ناپایداری مشهود است.
مواردی که در این پروژه آموزشی بررسی شده اند:
یک سیستم قدرت تک ماشینه متصل به شین بینهایت مطابق مثال دو فصل دوازدهم کتاب کندور در نظر میگیریم. براي ژنراتور از مدل هفرون فیلیپس با در نظر گرفتن سیستم تحریک (مدل 4 حالته) استفاده میکنیم.
و Bsat ،Asat ،Lfd ،Rfd ،Ra ،Ll ،Lq ،Ld ،XE ،RE ،Et ،Qt ،Pt مقادیر کلی حالت در لذا ψ T1 ورودي پارامتر عنوان به لحاظ می گردند.
در هر یک از حالتهاي زیر ضمن شبیه سازي سیستم با استفاده از مدل 4 حالته (مطابق نمودار بلوکی شکل صفحه 957 کتاب کندور)، مقادیر K1 تا K6 به همراه Ks و KD را حساب نموده و پایداري سیگنال کوچک را با گزارش خروجی مناسب از شبیه سازي (تغییرات زاویه رتور یا تغییرات سرعت) بررسی میکنیم.
الف) بدون وجود پایدارساز سیستم قدرت
ب) با وجود پایدارساز سیستم قدرت
ﺑﺮرﺳﯽ ﺗﺎﺛﯿﺮ KD ﺑﺮ ﭘﺎﯾﺪاري ﺑﺎ ﻓﺮض KD=4, 10, -2 : Pt=0.8 pu
ﺑﺮرﺳﯽ ﺗﺎﺛﯿﺮ KA ﺑﺮ ﭘﺎﯾﺪاري ﺑﺎ ﻓﺮض KA=10, 150, 350 : Pt=0.8 pu
ﺑﺮرﺳﯽ ﺗﺎﺛﯿﺮ Kpss ﺑﺮ ﭘﺎﯾﺪاري ﺑﺎ ﻓﺮض Kpss=0, 15 : Pt=0.8 pu
ﺑﺮرﺳﯽ ﺗﺎﺛﯿﺮ Et (وﻟﺘﺎژ ﺗﺮﻣﯿﻨﺎل ژﻧﺮاﺗﻮر) ﺑﺮ ﭘﺎﯾﺪاري ﺑﺎ ﻓﺮض Et=0.6, 0.95, 1.2 pu : Pt=0.8 pu
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.