


توضیحات
در پروژه طراحی کنترل کننده PID و Fuzzy برای کنترل سطح مایع مراحل پروژه به صورت گام به گام در محیط سیمولینک متلب توضیح داده شده است و فایل های نهایی به همراه خودآموز و گزارش راهنما پس از خرید، بلافاصله به ایمیل شما ارسال خواهد شد.
سیستم سطح مایع شکل زیر را در نظر بگیرید:
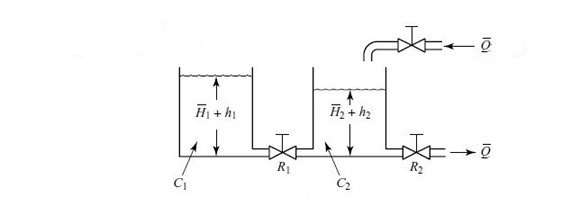
C ظرفیت مخازن و R مقاومت شیر است. ورودی سیستم جریان آب Q و خروجی های سیستم ارتفاع سطح در تانک H1 می باشد.
تابع تبدیل سیستم با روابط زیر مدل می شود. ( به ازای C1=C2=10 و R1=R2=0.1)
ظرفیت شیر را 20 و ارتفاع تانک را 2 در نظر می گیریم. هدف طراحی کنترل کننده PID و فازی مناسب برای سیستم و مقایسه نتایج است.
ابتدا در قسمت SIMULINK نرم افزار MATLAB شبیه سازی سیستم را با کنترل کننده PID انجام می دهیم.
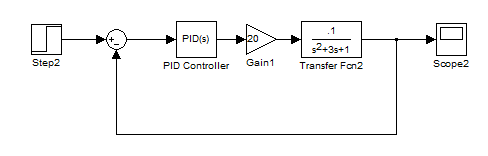
کنترل کننده PID و فازی
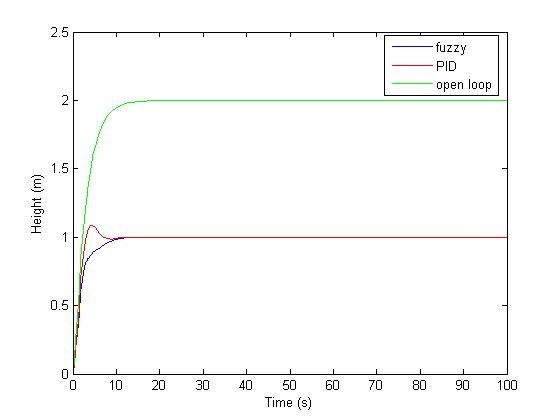
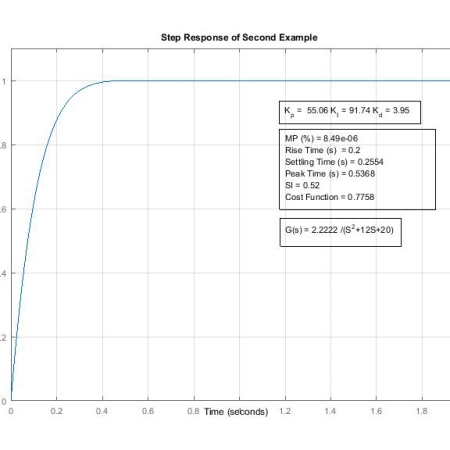
تصویر نتایج در متلب:
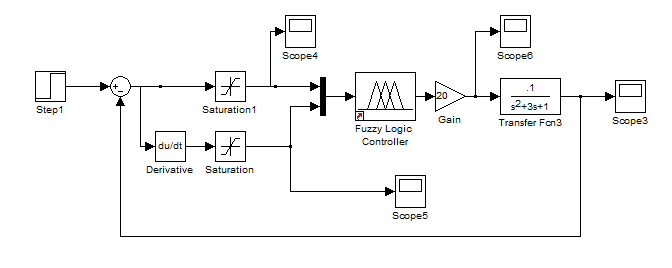
سیستم شبیه سازی شده با کنترل کننده فازی در قسمت SIMULINK نرم افزار MATLAB
سیستم شبیه سازی شده با کنترل کننده فازی در قسمت SIMULINK نرم افزار MATLAB

نتایج حاصل از کنترل سیستم با کنترل کننده PID و کنترل کننده fuzzy
توجه:
- برای دانلود فایل کامل پروژه لطفا اقدام به خرید نمایید.
- پس از خرید بلافاصله لینک دانلود فایل برای شما ایمیل خواهد شد.




علی صادقی –
فایل انگلیسی این پروژه موجود می باشد ؟