توضیحات
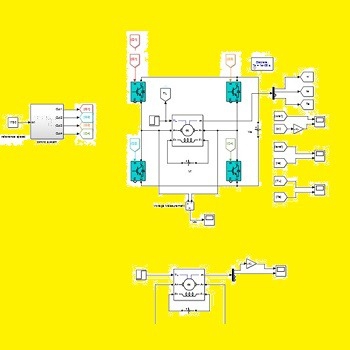
شبیه سازی کنترل کننده LQG با متلب
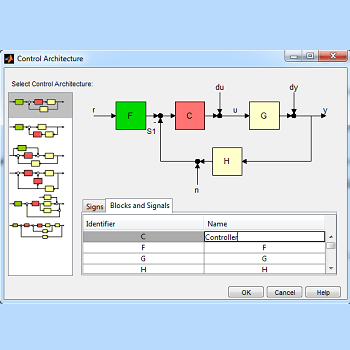
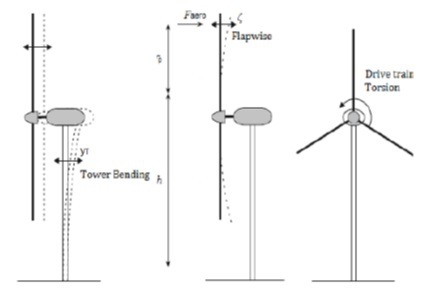
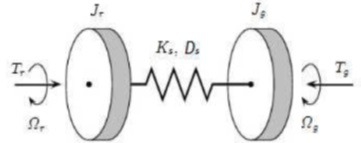
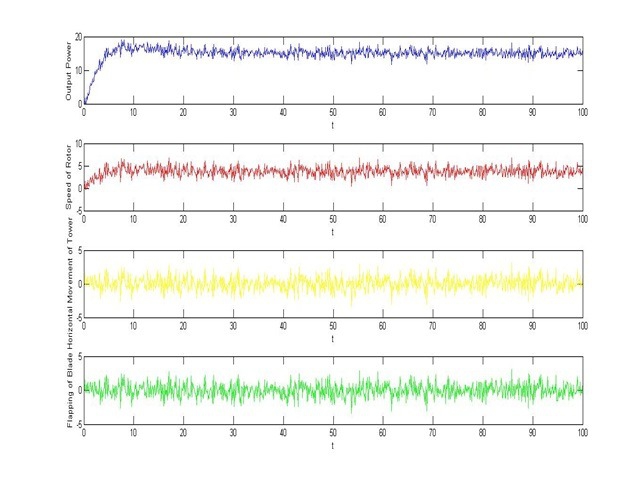
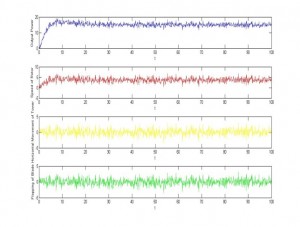
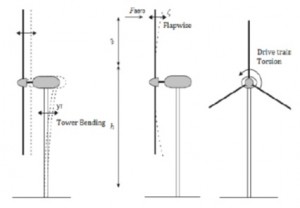
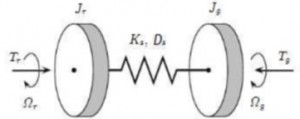
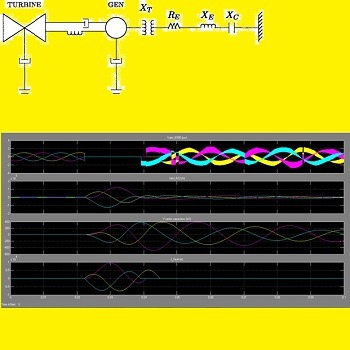
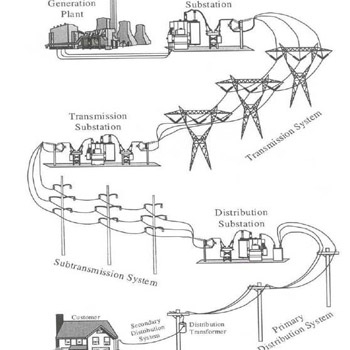
در این پروژه کنترل کننده(Linear Quadratic Gaussian)LQG را مورد ارزیابی قرار میدهیم.نحوهی طراحی این کنترل کننده،بررسی پایداری و مقاوم بودن این کنترل کننده مواردی هستندکه راجع به آنها به تفضیل صحبت میکنیم.نهایتاً این کنترل کننده را برای یک توربین بادی دو تیغهای که در آن فرآیند اتفاقی باد نقش اصلی را ایفا میکند،طراحی میکنیم و با بررسی نتایج به قابلیت بالای این کنترل کننده در کمرنگ کردن عامل مزاحم نویز و استفاده بهینه از سرعت باد پی میبریم.
کنترلکنندهی LQG یک کنترل کننده بهینه است.در کنترل بهینه ی سیستم هایکی از اهدافی که ما داریم این است که کنترل کنندهای بیابیم که بهترین عملکرد را با توجه شرایط مساله برای ما فراهم کند.به عنوان مثال در کنترل کننده رگولاتوری از حداقل مقدار ممکن انرژی سیگنال باید استفاده کنیم تا خروجی را به سمت صفر همگرا کنیم.
درحالت کلی، بهینه سازی با توجه به معیارهای مساله تنها ویژگی قابل قبول برای کنترل کننده نیست موارد دیگر از جمله پایداری سیستم، حاشیه بهره خوب، حاشیه فازخوب،مقاوم بودن با توجه دینامیک مدل نشده و..از دیگر مواردی است که در طراحی کنترلکننده باید مد نظر باشد.
در این پروه ما کنترل کنندهای را بررسی می کنیم که نسبت به معیارهای انرژی بهینه هستند.با توجه به این موضوع که برای طراحی این نوع از کنترل کنندهها از پروسه ی مینیمسازی استفاده می شود،این پروسه به صورت اتوماتیک منجر به کنترلکنندهای میشود که تا حد زیادی پایداری و مقاوم بودن را تضمین میکند.در حقیقت کنترلکنندههایی که در طی این مسیر به دست میآیند از لحاظ معیارهای کنترلی،کنترل کننده هایی بسیار خوب هستند،به طوری که اغلب در مواقعی که حتی نیازی به مینیممسازی نداریم باز هم از پروسهی طراحی این کنترل کنندهها استفاده می کنیم.علاوه بر تمام این ها این پروسه قابل اعمال به سیستمهای چند ورودی-چندخروجی است.از آن جا که طراحی کنترل کنندهی کلاسیک برای سیستمهای MIMOبسیار مشکل است استفاده از کنترلکنندههای بهینه همواره پیشنهاد میشود.
شبیه سازی کنترل کننده LQG با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.