


توضیحات
شبیه سازی کنترل کننده فازی برای ربات جستجوگر با متلب
در این پژوهش یک کنترل کننده فازی برای ربات جستجوگر طراحی شده است. در این کنترل کننده ربات با استفاده از منتطق فازی مسیر درست را انتخاب می کند.
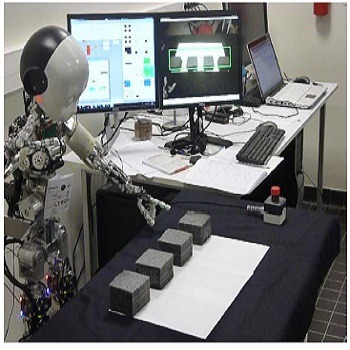
این سیستم یک سیستم کنترلی دقیق برای کنترل سرعت چرخ یک ربات می باشد. سه کنترل کننده شامل جبران ساز پیش فاز و پس فاز و تفاضلی و منطق فازی برای این پژوهش طراحی شده اند تا نرخ زاویه ای چرخش محور یک موتور DC را برای ربات که میان قسمت های محتلف در حرکت است و اطلاعات را از طریق دوربین از محیط دریافت می کند تنظیم شود.
سیستم فازی اطلاعات بهتری در خصوص تعیین سرعت چرخ ارائه می کند. زیرا که با تعیین پارامترهای مختلف تعیین سرعت با استفاده از قوانین عقلی تعیین شده صورت میگیرد.
در فایل main.m توابع توصیف کننده ربات تعریف شده اند و پاسخ آنها بررسی شده. در فایل fuzzy.m سیستم فازی به همراه جدول قوانین آن تعریف شده است. این سیستم با دریافت میزان خطای سیستم ضریب جبران مناسب برای اصلاح خطا را به سیستم کلی میدهد. به این صورت با جبران خطا دقت سیستم بسیار بالا خواهد رفت.
شبیه سازی کنترل کننده فازی برای ربات جستجوگر با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.








دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.