توضیحات
پروژه شبیه سازی کنترل پیش بینی مدل خودرو هیبریدی مستقل زیر آب با متلب :
در فولدر مقاله شبیه سازی شده چهار فایل به شرح زیر وجود دارد:
- فایل m که باید قبل از اجرای فایل های سیمیولینک آن را اجرا کنید تا کنترلکننده پیش بین طراحی شده برای AUV به متلب معرفی شود.
- فایل سیمیولینک AUV_MPC_CONTROL_SYSTEM_Part1 که بخش اول شبیه سازی مقاله را انجام می دهد.
- فایل سیمیولینک AUV_MPC_CONTROL_SYSTEM_Part2 که بخش دوم شبیه سازی مقاله را انجام میدهد.
- فایل m نیز مدل سیستم را به صورت یک فایل متلب پیاده سازی می کند.
این فایلها در نرم افزار متلب 2011 نسخه b نوشته و کاملا اجرا شده اند. ابتدا فایل main.m را اجرا کنید و پس از آن هر کدام از فایل های سیمیولینک که مایل به مشاهده نتایج آن هستید را اجرا نمایید.
تشریح فایل main.m
در این فایل کنترل کننده پیش بینی که توسط ابزار mpctool طراحی شده است از فایل ذخیره شده بارگذاری می شود. همچنین مدل سیستم و گسسته سازی شده آن که در کنترل کننده mpc از آن استفاده می شود تعریف شده است…
تشریح فایل AUV_MODEL.m
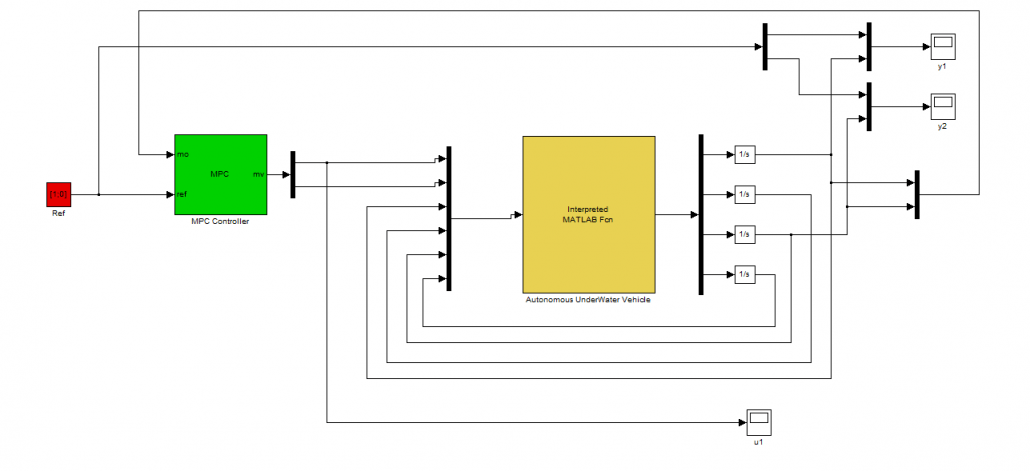
تشریح فایل سیمیولینک AUV_MPC_CONTROL_SYSTEM_Part1
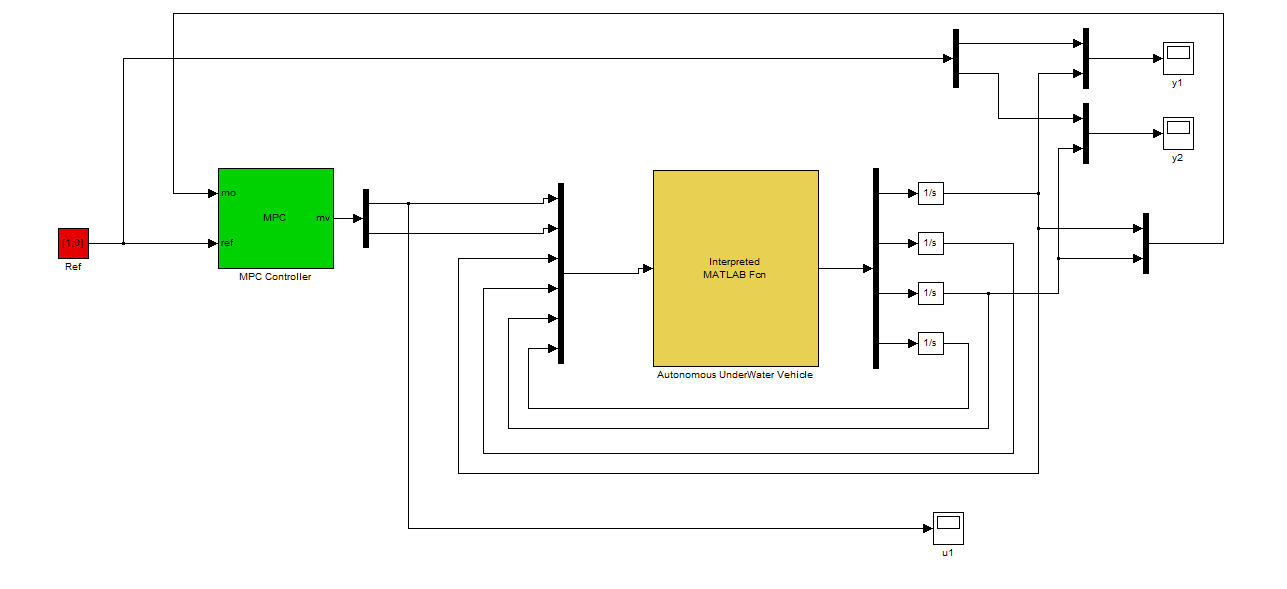
تشریح فایل سیمیولینک AUV_MPC_CONTROL_SYSTEM_Part2
برخی از تصاویر پروژه شبیه سازی شده کنترل پیش بینی مدل:
شکل 1: پیاده سازی کنترل کننده پیش بین بر روی AUV

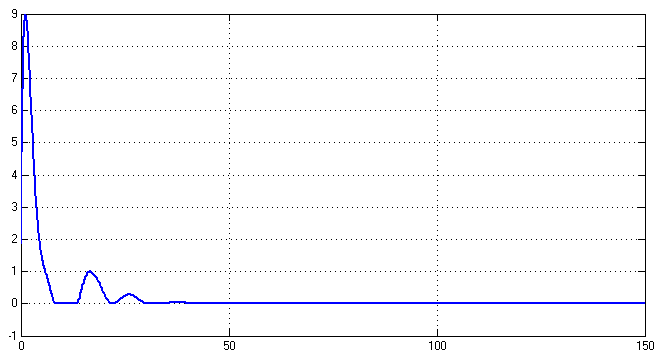
شکل 4: سیگنال کنترلی u1
نکات قابل ذکر:
- شبیه سازی کنترل پیش بینی مدل خودرو هیبریدی مستقل زیر آب با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایل های پروژه به صورت کامل به همراه گزارش پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.