توضیحات
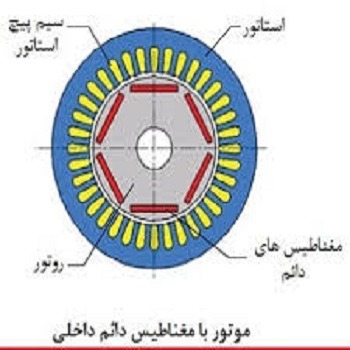
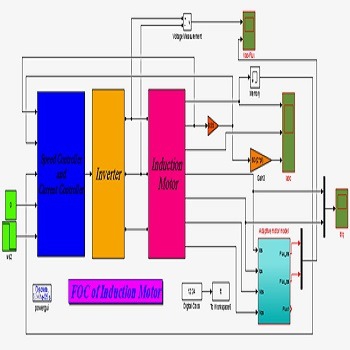
شبیه سازی کنترل مستقیم گشتاور موتور سنکرون مغناطیسی دائم با متلب
در روش FOC، برای بهبود عملکرد سیستم، گشتاور خروجی بهصورت غیر مستقیم با استفاده از تنظیمکنندههای[1] جریان استاتور کنترل میشوند. این مسئله بار محاسباتی سیستم را به شدت افزایش میدهد و همچنین پاسخ دینامیکی سیستم را پایین میآورد.
برای رفع این مشکل، روش دیگری مبتنی بر اصول اولیه کنترل برداری، بهنام کنترل مستقیم گشتاور پیشنهاد شده است که گشتاور و شار فاصله هوایی را بهصورت مستقیم تنظیم میکند. در ابتدا روش DTC بیشتر برای درایو موتورهای القایی دورانی استفاده میشد [6-5]. ایده اصلی روش کنترل مستقیم گشتاور برای موتورهای القایی، کنترل شار پیوندی و گشتاور با انتخاب بردار ولتاژ مناسب از طریق الگوی کلیدزنی مناسب است [1]. امروزه از این روش در سیستم درایوهای موتورهای سنکرون مغناطیس دائم PMSM نیز به وفور استفاده میشود.
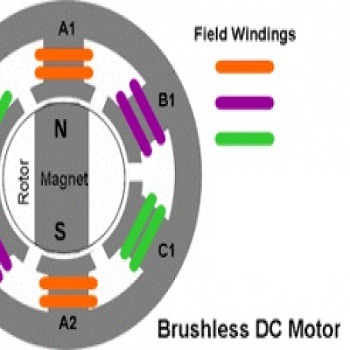
کنترل مستقیم گشتاور در راستای کنترل برداری موتورهای AC است. اصول DTC ابتدا توسط I. Takahashi و T. Noguchi معرفی شده. وظیفه DTC تامین پاسخ سریع برای گشتاور الکترومغناطیسی موتور میباشد. بر خلاف کنترل برداری، که گشتاور با تغییر بردارهای جریان استاتور تغییر میکند، در DTC متغیرهای کنترل بردارهای شار پیوندی استاتور Ψs میباشند. تغییر شار پیوندی توسط سوئیچهای قدرت اینورترهای منبع ولتاژ که موتور را تغذیه میکنند، بدست میآید.
جهت پیاده سازی این سیستم کنترلی، در محیط سیمیولینک نرم افزار متلبR2016b استفاده شده است. مشخصات موتور القایی استفاده شده در شبیه سازی به شرح زیر است:
Rs= 1.3, Flux Linkage = 0.175, Lm= 0.165, Ls= 0.395 mH, J= 0.0008
شبیه سازی کنترل مستقیم گشتاور موتور سنکرون مغناطیسی دائم با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.