


توضیحات
شبیه سازی مقاله کنترل موتور سنکرون مغناطیس دائم توسط اینورتر چهار پایه با متلب
چکیده مقاله مرجع:
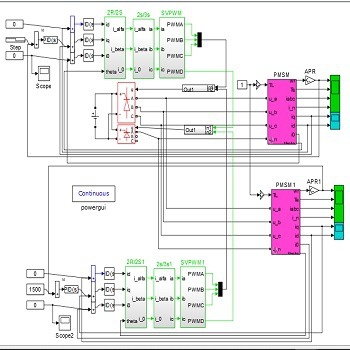
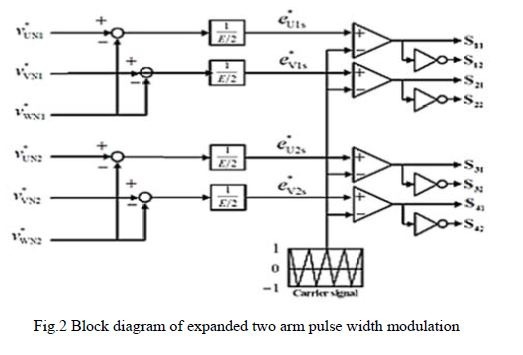
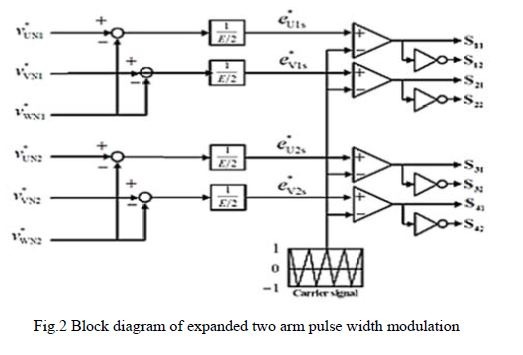
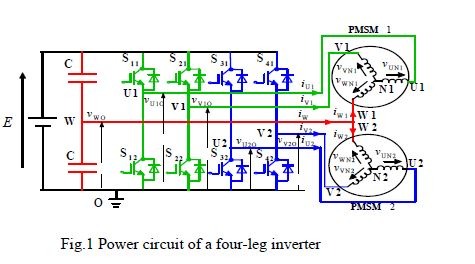
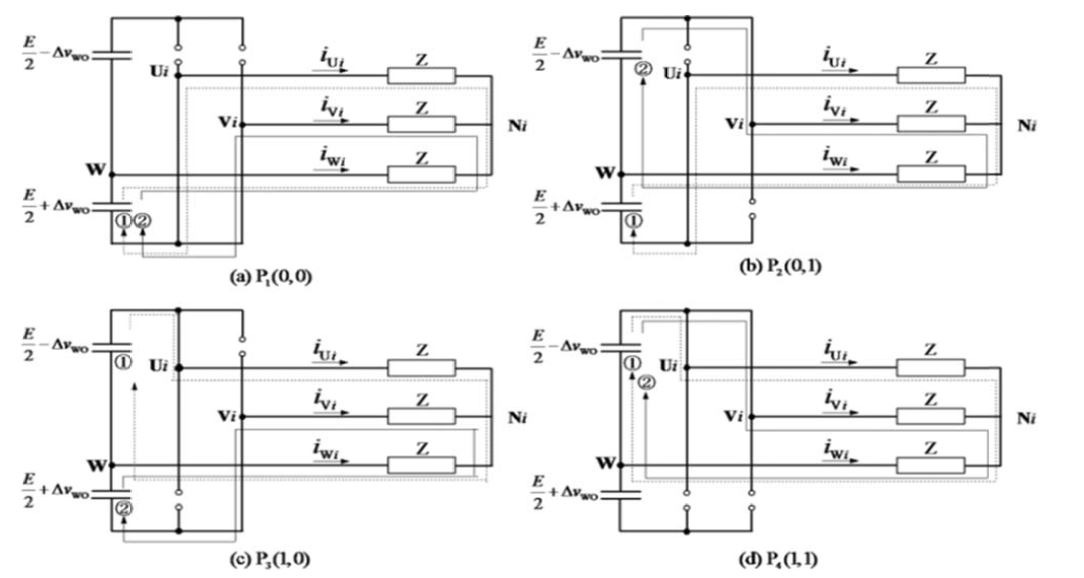
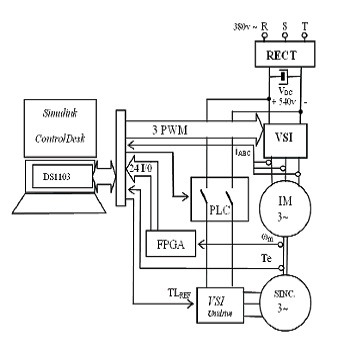
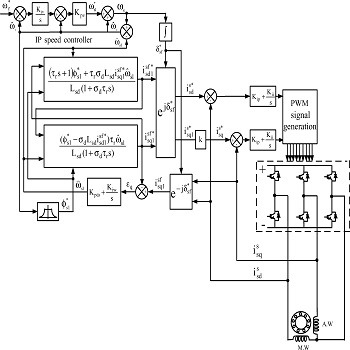
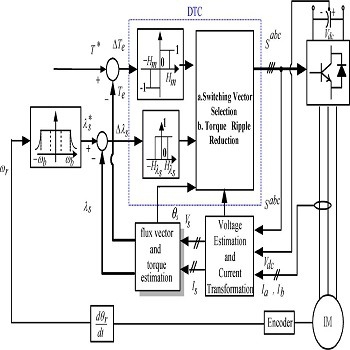
این مقاله یک استراتژی کنترل بردار برای کنترل مستقل دو موتور همزمان موتور دائمی (PMSM) را با استفاده از یک اینورتر چهار پایه (4LI) پیشنهاد می کند. یک مدولاسیون گسترش دو طرفه برای به دست آوردن ولتاژ خروجی سه فاز متوازن توصیف شده است. این مقاله همچنین یک روش برای جبران نوسانات ولتاژ خنثی دو خازن شکسته در لینک DC ارائه می دهد. نتایج تجربی نشان می دهد که کنترل سرعت مستقل و موقعیت دو PMSM را می توان با استفاده از یک 4LI با استفاده از روش کنترل بردار پیشنهاد کرد.

شبیه سازی مقاله کنترل موتور سنکرون مغناطیس دائم توسط اینورتر چهار پایه با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.