



توضیحات
شبیه سازی مقاله کنترل مد لغزشی با متلب
بطور کلی طراحی کنترل کننده مد لغزشی شامل دو مرحله می باشد:
- طراحی سطح لغزش که باعث می شود تا مرتبه ی سیستم بسته کاهش یابد و بستری مقاوم را در حرکت سیستم به سمت نقطه تعادل فراهم سازد.
- انتخاب سیاست کنترلی مناسبی است که سیستم را به سمت این سطح حرکت داده و قرار گرفتن و باقی ماندن بر روی آنرا تضمین کند.
توضیح مختصری راجع به روش کار:
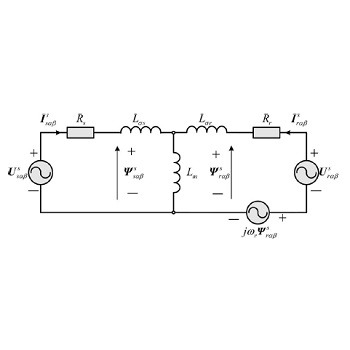
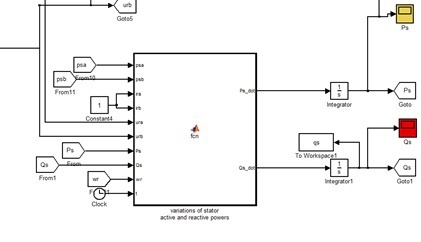
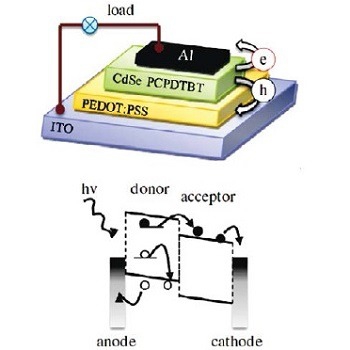
معادلات جریان و شار در دو مرجع استاتور و روتور در بلوک زیر پیاده سازی شده است که مطابق با معادلات مقاله می باشد.
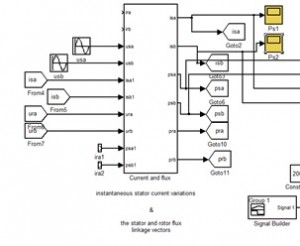
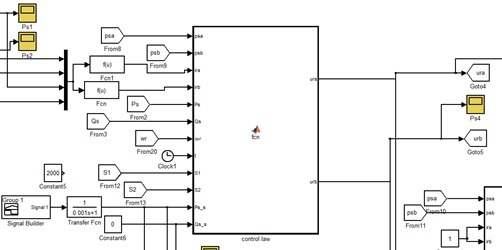
در ادامه بلوکی که در آن قانون کنترل پیاده سازی شده است به همراه معادلات آن آمده است. توانهای مرجع و فرکانس سرعت زاویهای سیستم DFIG یعنی نیز ورودی دیگری است که توسط سیستم DFIG خارج از این بلوک ساخته میشود و شار و جریان نیز در بلوک بالا ایجاد میشود.
…
نکات قابل ذکر:
- شبیه سازی مقاله کنترل مد لغزشی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.