

توضیحات
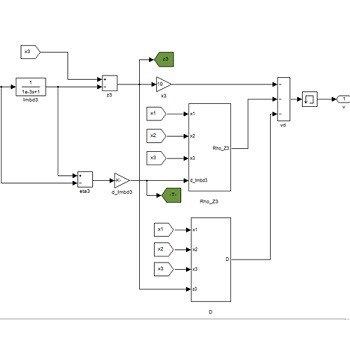
شبیه سازی مقاله کنترل دینامیک با استفاده از شبکه عصبی با متلب
کلاسی از سیستم های غیرخطی فیدبک-محض با اشباع ورودی و اغتشاشات نامعین که توسط مجموعه معادلات رابطه 1 توصیف میشوند را در نظر بگیرید.
![]()
در این رابطه متغیرهای حالت های سیستم هستند که فرض می شود تماما قابل اندازهگیری هستند; متغیر خروجی سیستم غیرخطی نامعین; توابع
توابع پیوسته و نامعلوم; متغیر اغتشاش نامعلوم و کراندار; متغیر ورودی کنترل و متغیر ورودی سیستم را نشان میدهد که تحت غیرخطی اشباع توصیف شده توسط رابطه 2 است.

در این رابطه کران بالای سیگنال اعمال شده به سیستم است. برای اینکه بتوان در الگوریتم DSC[2] به طور کارآمدی با مسئله وجود اشباع روبرو شد, توسط تابع رابطه 3 تقریب زده می شود.
![]()
واضح است که به دلیل استفاده از عمل تقریب بین سیگنال های و تفاوت وجود دارد که این تفاوت را با نمایش می دهیم و توسط رابطه 4 قابل توصیف است.
![]()
به دلیل ویژگی کرانداری دو تابع و , برای یک کران بالا وجود دارد که در رابطه 5 نشان داده شده است.
![]()
با در نظر گرفتن تقریب ذکر شده برای تابع اشباع, معادلات دینامیکی 1 به صورت رابطه 6 قابل بازنویسی هستند.
![]()
برای ساده تر کردن روند طراحی DSC برای سیستم غیرخطی نامعین, با به کارگیری قضیه مقدار میانگین میتوان را به صورت
بیان نمود که در آن و است. با انتخاب و داریم
![]()
با تعریف معادلات دینامیکی 6 به صورت رابطه 9 بیان خواهند شد.
![]()
شبیه سازی مقاله کنترل دینامیک با استفاده از شبکه عصبی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.