


توضیحات
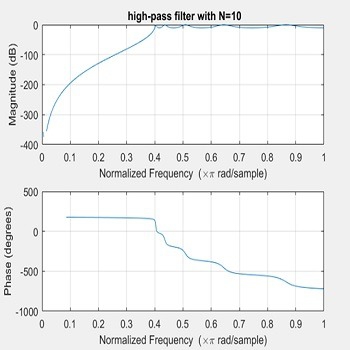
شبیه سازی مقاله کنترل بهینه سیستم های دینامیکی سازه در فضای تک بعدی به کمک اصل حداکثر با متلب
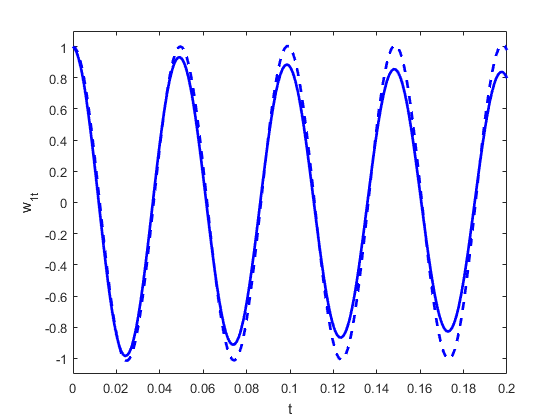
یک اصل حداکثر برای یک کلاس از مسائل مربوط به کنترل بهینه یک سیستم معادلات هیپربولیکی خطی در فضای یک بعدی که لزوما جدایی ناپذیر نیست، توسعه داده می شود. یک شاخص عملکرد ارائه شده است که شامل عملکردهای بردار متغیر حالت، مشتقات فضایی اول و دوم و مشتق زمان اول مرتبه و یک تابع مجاز شامل یک بردار نیروی کنترل حلقه باز است. راه حل مسئله کنترل بهینه به راحتی می تواند منحصر به فرد با استفاده از استدلال های محدب باشد. اصل حداکثر داده شده شامل یک همیلتون است که حاوی یک تابع بردار مجزا و همچنین یک تابع بردار کنترل پذیر است. حداکثر اصل را می توان برای محاسبه عملکرد بردار کنترل بهینه استفاده کرد و به ویژه برای مشکلات کنترل کنترل عناصر ساختاری برای سرکوب ارتعاش مناسب است. یک مثال عددی داده شده است که کنترل فعال پرتو در حال انجام ارتعاش های خمشی و لرزش را بررسی می کند. مقايسه انرژي هاي پرتوهاي كنترل شده و كنترل كننده نشان مي دهد كه روش كنترل پيشنهادي در كاهش ارتعاشات سيستم هاي ساختاري بسيار موثر است.
گرچه حداکثر اصل ارائه شده به معادلات حالت که شامل بیش از چهار مشتق از فضای محدود است محدود می شود، روش های استفاده شده می توانند بدون تغییر مفهومی به مشتقات بالاتر سازگار شوند. این محدودیت ها برای وضوح ارائه ارائه شده است، در حالی که حفظ کاربرد کاربرد این تکنیک برای مشکلات ناشی از مکانیک ساختاری است
شبیه سازی مقاله کنترل بهینه سیستم های دینامیکی سازه در فضای تک بعدی به کمک اصل حداکثر با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.