توضیحات
پروژه شبیه سازی ردیابی خودرو با استفاده از فیلتر کالمن با متلب:
یک الگوریتم تفریق پس زمینه برای شناسایی و ردیابی وسایل نقلیه
چکیده
یک سیستم ابتکاری برای تشخیص و استخراج وسایل نقلیه در صحنه های ترافیک ارائه شده است. این سیستم شامل اجسام در حال حرکت در صحنه های ترافیک جاده با اجرای پیشرفته روش تفریق پس زمینه می باشد. نوآوری مربوط به یک روش فیلتر کردن مبتنی بر هیستوگرام، است که با جمع آوری اطلاعات پراکنده پس زمینه در یک دنباله از قاب ها، در سطح پیکسل، به تولید نمونه قابل اعتماد از پس زمینه ی واقعی می پردازد. الگوریتم پیشنهادی به بازسازی پس زمینه تحت هر شرایط ترافیکی میپردازد. الگوریتم بازسازی پس زمینه نشان داد عملکرد قوی در شرایط عملیاتی مختلف از جمله روشنایی ناپایدار، زاویه مختلف و تراکم دارد.
مقدمه
افزایش شبکه های جاده شهری و ملی در طول سه دهه گذشته نیاز به نظارت کارآمد و مدیریت ترافیک جاده را به وجود آورده است.
فن آوری متعارف برای اندازه گیری ترافیک، از جمله حلقه القایی، آشکارسازهای سونار یا مایکروویو ، اشکالاتی دارند: نصب آنها گران است، آنها باعث اختلال ترافیک در هنگام نصب و یا تعمیر و نگهداری، آنها قابل حمل نیستند و آنها قادر به تشخیص وسایل نقلیه آهسته یا ثابت نیستند.
در عوض سیستم های ویدئو نصب آسان دارد، می تواند بخشی از شیب سنج باشد و ممکن است در زیرساخت های نظارت ترافیک استفاده شود. علاوه بر این، آنها می توانند به راحتی به روز رسانی شود و آنها دارای انعطاف پذیری در طراحی مجدد سیستم هستند و قابلیت های خود را به سادگی با تغییر الگوریتم های سیستم تغیر میدهند. این سیستم قابلیت شمارش خودرو ، طبقه بندی، اندازه گیری سرعت و خودرو شناسایی حوادث ترافیک (از جمله تصادفات و یا تراکم سنگین ) را دارد.
در یک مدل پس زمینه معمولا یک نمونه اولیه از پس زمینه تصویر (مقدار دهی اولیه از پس زمینه) برای اولین بار در نظر گرفته می شود. و پس از آن هر پیکسل از نمونه اولیه با تصویر واقعی از لحاظ رنگ مقایسه می شود. اشکال اصلی از الگوریتم تفریق پس زمینه پیچیدگی برای تعریف پس زمینه است.
در این مطالعه ما یک الگوریتم ابتکاری بازسازی پس زمینه، به عنوان بخشی از یک سیستم برای تعیین محل
و ردیابی وسایل نقلیه در ویدیوی ترافیک ارایه می دهیم. هدف از این مطالعه ب غلبه بر نقاط ضعف الگوریتم تفریق پس زمینه، یعنی مقدار دهی اولیه و به روز رسانی پس زمینه و ساخت یک روش قوی، قادر به تشخیص وسایل نقلیه در شرایط ترافیک واقع بینانه است.
نوآوری نهفته در این مطالعه در الگوریتم پیشنهادی برای بازسازی نقشه رنگ پس زمینه واقعی بدون نیاز به هیچ دخالت انسان حتی در شرایط ترافیک خشن، مانند متوقف کردن و رفتن ترافیک، وسایل نقلیه (به عنوان مثال تصادف) و بارش باران یا برف است.
- تشخیص وسایل نقلیه
این سیستم بر اساس الگوریتم تفریق پس زمینه است، همانطور که در پاراگراف قبلی ذکر شد. به طور معمول یک الگوریتم تفریق پس زمینه دارای سه مرحله است
– مقدار دهی اولیه به پس زمینه.
– استخراج پیش زمینه.
– نگهداری پس زمینه
روش ما با روشهایی که تاکنون ارائه شده است تفاوت دارد. روش پیشنهادی ما بر روی محاسبه و بازسازی پس زمینه بر اساس اطلاعات سطح پیکسل هایی است که در فریم های متوالی دارا می باشند. این مکانیسم به پروسه تفریق پس زمینه این اجازه را می دهد تا به صورت متناوب آپدیت خود را مستقل از وجود احتمالی اشیای موجود در پیش زمینه انجام دهد.
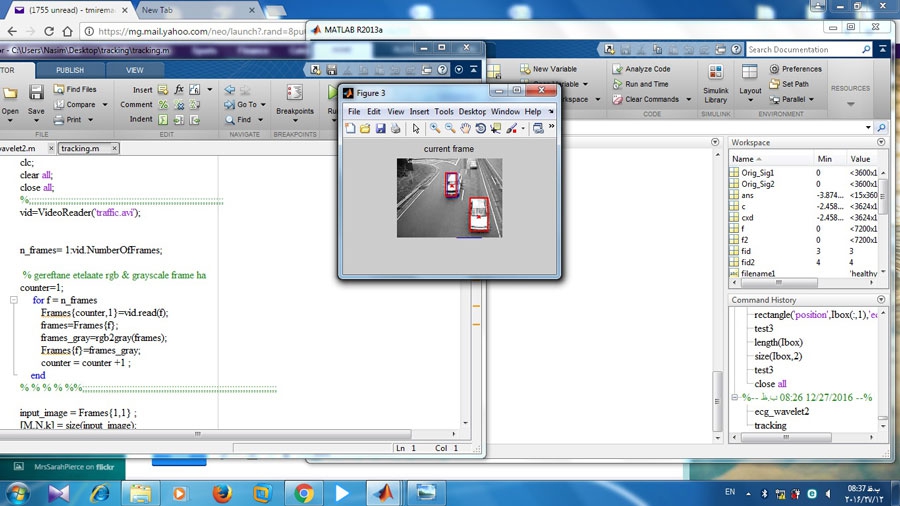
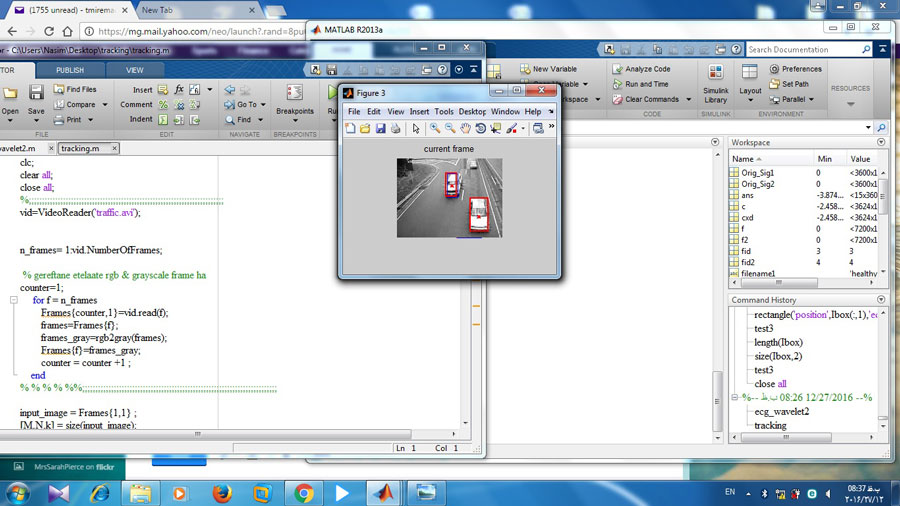
برخی از تصاویر شبیه سازی ردیابی خودرو با استفاده از فیلتر کالمن با متلب:
نکات قابل ذکر:
- پروژه شبیه سازی ردیابی خودرو با استفاده از فیلتر کالمن با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





علی صادقی –
این پروژه را میتوان به عنوان پروژه ، سیتم کنترلر p یا pi یا pd یا pid میتوان استفاده کرد ؟