

توضیحات
تحلیل دینامیک ربات استوارت با متلب
در این پروژه دینامیک پلتفرم استوارت مورد بررسی قرار خواهد گرفت. این موضوع در شبیه سازی و الگوریتمهای کنترلی برخط و مدل-مبنا[۱] که مستلزم داشتن مدل دقیق رفتار سیستم میباشند دارای اهمّیت ویژهای میباشد. در فصل اوّل به کارهای انجام شده در این زمینه اشاره کردیم. ما نیز با استفاده از روشکین مدل جامعی از دینامیک روبات را ارائه خواهیم نمود و در ادامه ابتدا به بیان روابط سینماتیکی و سرعتها و شتابهای اجزای مختلف روبات میپردازیم و پس از آن با استفاده از روش کین در مدلسازی دینامیکی اجسام صلب، معادلات حرکت روبات را بدست میآوریم و سپس با استفاده از ماتریسهای ژاکوبین فرم ماتریسی معادلات حرکت روبات را بدست میآوریم.
در این پروژه معادلات حرکت روبات استوارت را از طریق روش کین فرمولبندی کردیم. مدلسازی اجزای روبات بدون سادهسازی انجام گرفت. معادلات دینامیکی نهایی مشابه معادلات بدستآمده از روش کار مجازی ]۳[ میباشند. قابل ذکر است که جزئیات دینامیکی بازوها در ]۳[ به صورت سادهای مدل شدهاست، امّا در مدل ارائه شده در اینجا پارامترهای هندسی و دینامیکی بازوها را به صورتی کلّی و بدون اعمال سادهسازی در آنها به کار بردیم. الگوریتم ارائه شده برای حل دینامیک معکوس نیز بار محاسباتی اندکی دارد و با توجه به تستهای انجام شده چیزی در حدود یکچهارم روشهایی نظیر روش نیوتون-اولر است. این مسئله الگوریتم مذکور را برای مقاصد کنترلی دقیق مناسب میسازد.
فهرست مطالب:
- ۱- دینامیک مکانیزم استوارت
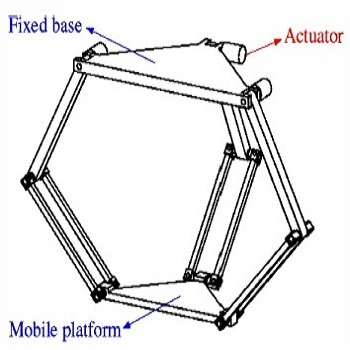
- ۱-۱- معرفی
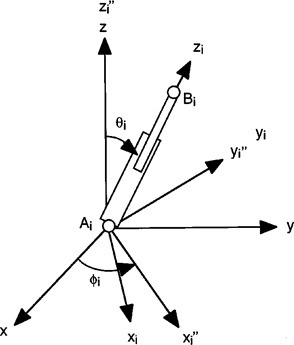
- ۱-۲- روابط سینماتیکی و تعاریف
- ۱-۲-۱- تحلیل سرعت و ژاکوبینها
- ۱-۲-۲- تحلیل شتابها
- ۱-۳- دینامیک
- ۱-۳-۱- روش کین
- ۱-۳-۲- دینامیک معکوس[۱] روبات استوارت
- ۱-۳-۲-۱- الگوریتم محاسباتی
- ۱-۳-۲-۲- کارایی روش
- [۲۰]Di Gregorio, R. (2001). Analytic formulation of the 6-3 fully-parallel manipulator’s singularity determination. Robotica, 19(6), 663-667.
- Dasgupta, B., & Mruthyunjaya, T. S. (1998). A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mechanism and Machine Theory, 33(8), 1135-1152.
- Tsai, L. W. (2000). Solving the inverse dynamics of a Stewart-Gough manipulator by the principle of virtual work. Journal of Mechanical design, 122, 3.
- Kane, T. R. (1961). Dynamics of nonholonomic systems. Journal of Applied Mechanics, 28, 574.
- Kane, T. R., & Wang, C. F. (1965). On the derivation of equations of motion. Journal of the Society for Industrial & Applied Mathematics, 13(2), 487-492.
- Kane, T. R., & Levinson, D. A. (1980). Formulation of equations of motion for complex spacecraft. Journal of Guidance, Control, and Dynamics, 3(2), 99-112.
تحلیل دینامیک ربات استوارت با متلب دارای فایل راهنما، پاورپوینت و فایل نرم افزاری میباشد.
تحلیل دینامیک ربات استوارت با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
سفارش پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.