توضیحات
عنوان: کنترل هوشمند ترافیک شهری
- چکیده
- فصل اول: مقدمه
- مقدمه
- کنترل سیگنال ترافیک
- سیستمهای کنترل هوشمند در کشورهای مختلف
- استفاده از هوش محاسباتی در کنترل سیگنال ترافیک
- کنترل ترافیک شهری
- فصل دوم: ارائه مفاهیم اولی در خصوص کنترل هوشمند ترافیک شهری
- مقدمه
- پروتکلهای کنترل ازدحام در شبکه ترافیک شهری
- مدل ریاضی زمان سفر شهری
- مدیریت خدمات در کنترل ترافیک هوشمند
- کنترل منطق فازی در مدیریت ترافیک شهری
- سیستم اطلاعاتی ترافیک
- سیستمهای وسایل نقلیه خودکار
- سیستم مدیریت ترافیک
- مرور کارهای انجام شده
- فصل سوم: بررسی ادبیات موضوع
- مقدمه
- کنترل ترافیک شهری در شهر مدالین: یک روش کنترل PID
- روششناسی برای تنظیم سناریوهای مدلسازی ترافیک شهری
- مثال مورد بررسی
- پیشبینی پذیری ترافیک شهری مبتنی بر تئوری آشوب
- بررسی غیرتصادفی و پیشبینی پذیر بودن سیستم با استفاده از نمادهای لیاپانوف
- سیستم فازی – عصبی
- شبیهسازی و نتایج
- شبیهسازی کنترل ترافیک شهری: رویکرد مدل صف
- برنامه کاربردی: شهر کوتبوس، آلمان
- سیستم کنترل هوشمندانه ترافیک برای شبکههای وسایل نقلیه بیسیم
- معماری سیستم کنترل هوشمند ترافیک
- بلوکهای عملکردی سیستم
- بررسی کارایی سیستم
- کنترل ترافیک شهری با سیستم فازی چندعامله
- گام آفلاین
- گام آنلاین
- شبیهسازی و نتایج
- فصل چهارم: نتیجهگیری
- مقدمه
- کارهای آینده
- نتیجهگیری
- مراجع
چکیده
مشکلات مربوط به ترافیک وسایل نقلیه که در شهرهای بزرگ و بزرگراهها قابل مشاهده است، عمدتاً به این دلیل است که ایجاد جادههای جدید یا گسترش آنها کار چندان آسانی نیست. این مسئله به عنوان یک سیستم بهینهسازی سیستمهای کنترل در نظر گرفته میشود که هدف آن استفاده حداکثری از زیرساخت موجود است. با این وجود، اندازه شبکههای ترافیکی و وجود تعداد زیادی وسیله نقلیه، باعث میشود پیادهسازی طرح کنترل مرکزی مبتنی بر بهینهسازی، تقریباً غیرممکن شود. به همین علت، امروزه استفاده از روشهای غیرمتمرکز در این خصوص دارای کاربرد بیشتری هستند.
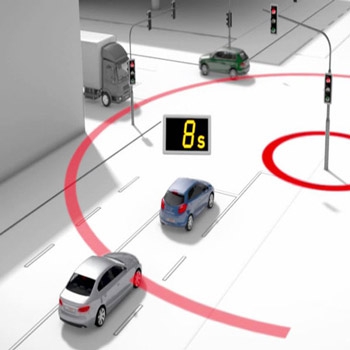
شهرکسازی سریع و تقاضای رو به رشد برای حمل و نقل سریعتر، منجر به تراکم سنگین در شبکههای حمل و نقل جادهای شده است و نیاز به سیستمهای کنترل سیگنال هوشمند پاسخگو ترافیکی را بیشتر کرده است. سیستم کنترل سیگنال توسعه یافته باید قادر به تعیین زمان سبز باشد که تاخیر زمان سفر در شبکه را بر اساس اطلاعات محدود محیطی به حداقل میرساند. سیستم ترافیک شهری شامل شبکههای راه، شبکههای آزادراه و رمپها با جریان ترافیکی ترکیبی از وسایل نقلیه، دوچرخه و عابر پیاده است. ازدحام ترافیکی غالباً رخ میدهد که بر زندگی روزانه افراد تاثیر میگذارد و انواع مشکلات و چالشها را به وجود میآورد. کاهش ازدحام ترافیک نه تنها امنیت و رفاه سفر را بهبود میبخشد بلکه باعث کاهش آلودگی محیط زیست میشود. یکی از بهترین روشها در این خصوص کنترل هوشمند ترافیک است.
کلمات کلیدی: کنترل ترافیک، مدیریت ترافیک، کنترل هوشمند، ترافیک شهری
فصل اول
مقدمه
- مقدمه
امروزه برآورد شده است که بیش از 600 میلیون اتومبیل سواری در جهان وجود دارد که تعداد آنها به میزان 50 میلیون در سال افزایش مییابد، هرچند که به دلیل بحران مالی جهان، در حال حاضر تا حدودی رشد تعداد اتوموبیلها کمتر از این پیشبینی بوده است. ما از راحتی و تسهیلات ماشینها لذت میبریم، در حالیکه در کنار این تسهیلات تراکم ترافیک، آلودگی محیط زیست و مواردی از این قبیل نیز در بر دارد. عوامل متعددی هستند که مسئول مشکلات ترافیکی هستند، مانند زیرساختهای ترافیکی و برنامهریزی غیر منطقی، عدم آگاهی عمومی از ترافیک و غیره. با این حال، عامل اصلی این است که سیستمهای کنترل ترافیک شهری[1] (TSC) موجود، به اندازه کافی کنترل و مدیریت ترافیک را به طور کامل انجام نمیدهند. طبق آمار موجود، اجرای یک سیستم پیشرفته کنترل ترافیک شهری روی جاده، ازدحام ترافیک را تا 6.7 درصد کاهش میدهد، زمان سفر وسایل نقلیه را تا 11.4 درصد، تاخیر سفر را تا 24.9 درصد کاهش میدهد. این آمار نشان دهنده اهمیت پیادهسازی یک سیستم کنترل ترافیک شهری بهینه و هوشمند است [1].
2-1- کنترل سیگنال ترافیک
TSC معمولاً به عنوان مهمترین و موثرترین روش کنترل ترافیک برای سفرهای ایمن و سریع در نظر گرفته میشود. از زمان معرفی کنترلکنندههای اتوماتیک ترافیک در ایالات متحده در ابتدای قرن گذشته، سیستم TSC پیشرفتهای مداوم داشته است. کار تحقیق نظری الگوریتمهای TSC به اواسط قرن بیستم باز میگردد. از آن پس، روش TSC در سه مرحله پیادهسازی میشوند: کنترل پیشگیری، کنترل پاسخگویی به ترافیک و کنترل هوشمند. با توجه به تکنولوژیهای پیشرفته سنجش و ارتباطات، اندازهگیریهای ترافیکی در زمان واقعی به طور معمول در دسترس است. تحقیق و فنآوری پیشرفته، پایهای برای TSC مدرن در زمان واقعی را ایجاد میکنند [1].
روش کنترل ثابت زمان، با استفاده از یک چرخه پیش تعیین شده و تقسیم (مدت زمان سبز به عنوان بخشی از زمان چرخه) برنامه زمانی، برای جریانهای نسبتاً ثابت و منظم ترافیکی مناسب است. وبستر و میلر یک مدل زمانبندی سیگنال ترافیک و روش محاسبه را برای به حداقل رساندن تاخیر متوسط وسایل نقلیه و ساختن پایه برای TSC مدرن ثابت ایجاد کردند. برای بهینهسازی کنترل سیگنال زودهنگام، برخی از نرمافزارهای آفلاین برای محاسبه تنظیمات سیگنال بهینه برای یک تقاطع یا یک شبکه توسعه داده شدند. ابزار ترافیک شبکه (TRANSYT) احتمالاً بهترین نمونه شناخته شده است. این ابزار میتواند مجموعهای از برنامههای سیگنال ثابت را برای ساعتهای مختلف یک روز یا برای شرایط ترافیکی خاص تکرار کند. از آنجا که سیستم ترافیک یک سیستم دینامیک است، هر طرح سیگنال ترافیک از قبل تعریف شده نمیتواند مناسب شرایط ترافیکی واقعی باشد [1].
کنترل زمان واقعی ترافیک با کمک فنآوریهای حساس به اجرا در آمده است. ایده این است که هر اقدام کنترل ترافیک تحت یک استراتژی کنترل خاص با توجه به دادههای ترافیک در زمان واقعی ایجاد شده است. کنترل اعمال شده یک روش متداول برای ترافیک، به خوبی توسعه یافته و به طور گستردهای استفاده میشود که زمان بندیهای مربوط به ترافیک را با توجه به زمان واقعی سنجش جریان ترافیک توسط آشکارسازهایی که در شبکه قرار دارند، تنظیم نماید. این روند، مرحلهها را انتخاب میکند و طول دورههای فاز را براساس تقاضای ترافیک و قوانین منطقی از پیش تعریف میکند. این روش برای شرایطی با اشباع ترافیک کمتر از 80٪ و نسبت تصادفی ترافیک مناسب است. گسترش فاز فعلی فقط به وسایل نقلیه فاز فعلی بستگی دارد، بدون در نظر گرفتن صفهای فازهای دیگر. بنابراین نمیتواند به صورت بهینه از منابع استفاده کند که شامل زمان و فضای کلی تقاطع میشود [1].
بر اساس روش کنترل زمان پاسخگو ترافیک ثابت، بسیاری از سیستمهای TSC توسعه داده شده و به طور گسترده در جهان استفاده میشود. سیستم ترافیکی تطبیقی هماهنگ شده سیدنی[2] (SCATS) یک سیستم کنترل انتخابی است که در آن، برنامه زمانی برای هر تقاطع با نیاز کلی زیر سیستمها انتخاب میشود. تکنیک بهینهسازی جبران تقسیم چرخه[3] (SCOOT) یک سیستم کنترل زمانبندی تطبیقی در زمان واقعی است که تنظیمات زمانبندی تقسیمات، چرخه و پارامترهای آفست را با یک روش بهینهسازی افزایشی کوچک انجام میدهد. این مورد اغلب نسخه پاسخگو ترافیکی TRANSYT در نظر گرفته میشود.
3-1- سیستمهای کنترل هوشمند در کشورهای مختلف
از آنجایی که سیستم، یک ساختار کنترل مرکزی را تصویب میکند، کنترل ترافیک در یک منطقه بزرگ دشوار است. بهینهسازی ترافیک شهری ایتالیا با استفاده از اتوماسیون یکپارچه (UTOPIA) / سیستم برای تعیین اولویت و بهینهسازی ترافیک[4] (SPOT) یک سیستم کنترل ترافیک زمان واقعی است که به ویژه برای کشورهایی با سیستم پیشرفته حمل و نقل عمومی مانند ایتالیا، نروژ، هلند، سوئد، فنلاند و دانمارک مناسب است. سیستم مدیریت عمومی ترافیک ژاپن[5] (UTMS) مبتنی بر سیستم کنترل ترافیک موجود با اطلاعات بیشتر است. این سیستم از طریق ارتباط دو جانبه با تجهیزات در وسایل نقلیه، سیستم اطلاعات ترافیک را برای کنترل سیگنالهای ترافیکی به دست میآورد. سیستم موثر توزیع شده سلسله مراتبی در زمان واقعی ایالات متحده[6] (RHODES) یک سیستم توزیع بهینه سلسله مراتبی است. آزمایشهای میدانی که در شهرهای آریزونا انجام شده که نشان داده است این سیستم در شرایط حمل و نقل با ازدحام متوسط کارآمدتر است.
یک سیستم مدیریت ترافیک تازه در حال ظهور سیستمهای حمل و نقل موازی چین[7] (PtMS) با معماری آن در شکل 1-1 نشان داده شده است. این سیستم با استفاده از سیستم مصنوعی، آزمایش محاسباتی، مکانیزم مواز[8]ی (ACP) برای کنترل و مدیریت ترافیک، تکنولوژیهای جدید را در محاسبات ابری، محاسبات اجتماعی و سیستمهای سایبری-فیزیکی-اجتماعی به کار میگیرد. این سیستم سه هدف اصلی دارد: سیستم عاملهای توزیع شده و تطبیقی برای سیستمهای حمل و نقل[9] (aDAPTS)، تخصیص ترافیک پویا بر اساس سیستمهای تطبیقی پیچیده[10] (DynaCAS) و سیستمهای آموزش اپراتور برای حمل و نقل[11] (OTSt). همچنین یک سیستم مصنوعی موازی با سیستم واقعی نیز وجود دارد. تجزیه و تحلیل و ارزیابی میتواند به راحتی بر روی سیستم مصنوعی انجام شود. اقدامات کنترل و مدیریت میتواند از طریق اجرای همزمان از سیستم واقعی و مصنوعی گرفته شود [1].
سیستمهای کنترل ترافیک تحت تاثیر عوامل بسیاری قرار میگیرند: زیرساختهای ترافیکی، وسایل نقلیه، مسافران، آب و هوا و مواردی از این قبیل. هر عامل دارای ویژگیهای خاص خود است، که کل سیستمهای ترافیک را تبدیل به سیستمهای تصادفی غیرخطی پیچیده و بزرگ میکند و بسیاری از مشکلات و چالشها را برای محققان و مهندسین ایجاد میکند. گرچه نظریههای کنترل سنتی برای چندین دهه کاربرد دارند، هنوز هم رضایتبخش نیستند. علاوه بر این، سیستمهای کنترل ترافیک شامل رفتارهای انسانی نیز است. بنابراین، واکنشهای انسانی به سیستم و احساس آنها نسب به سیستمها نیز باید مورد توجه قرار گیرد. سیستم TSC به عنوان پیشینهای از سیستم حمل و نقل هوشمند (ITS) باید به شیوهای هوشمندانه عمل کند [1].
شکل 1-1: ساختار سیستم سلسله مراتبی PtMS [1]
4-1- استفاده از هوش محاسباتی در کنترل سیگنال ترافیک
از آنجایی که هوش محاسباتی[12] چند دهه پیش ظهور کرده، اکنون بسیار سریع به یک زمینه تحقیق داغ تبدیل شده است. این ادعا به عنوان جانشین هوش مصنوعی[13] (AI) و راهی برای محاسبات آینده است. روشهای CI حل مشکلاتی را که قبلاً دشوار یا غیر ممکن بود، آسان میکند. ایده مرسوم CI، شبیهسازی هوش طبیعت تا حدودی با استفاده از روشهای محاسباتی خاص است که شامل شبکههای عصبی مصنوعی[14] (ANNs)، سیستمهای فازی و الگوریتمهای محاسبات تکاملی[15] (EC) هستند. هر روش با بسیاری از شاخهها توسعه یافته است. علاوه بر این، CI همچنین از تکنیکهایی مانند هوش ذرات[16] (SI)، سیستمهای ایمنی مصنوعی، یادگیری تقویتی[17] (RL) و غیره استفاده میکند [1].
دلایل متعددی وجود دارد که استفاده از روشهای CI در سیستمهای TSC آسان است. اولاً، همانطور که قبلاً ذکر شد، سیستمهای TSC، سیستمهای تصادفی غیرخطی پیچیده و بزرگی هستند. بنابراین، تنظیمات بهینه سیگنال ترافیک، مشکل است. CI یک روش عملی برای به دست آوردن راه حلهای بهینه یا زیربخشهای بهینه است. ثانیاً، بهترین روشهای بهینه سیگنال ترافیک بر اساس مدلهای دقیق ترافیک ریاضی است. با این حال، مدل کردن دقیق ترافیک پویا بسیار سخت است. بیشتر روشهای CI به مدلهای دقیق نیاز ندارند. گاهی اوقات، هیچ مدلی حتی مورد نیاز نیست. دلیل سوم، به عنوان یک تعریف وسیعتر CI، مطالعه مکانیسمهای سازگاری برای فعال کردن یا تسهیل رفتارهای هوشمند در محیطهای پیچیده، نامشخص و متغیر است. روشهای CI را میتوان با سیستمهای ترافیکی پویا سازگار کرد. اقدامات TSC را میتوان بر اساس شرایط ترافیکی زمان واقعی و استدلالهای تاریخی انجام داد. محققان کار زیادی برای استفاده از CI در زمینه TSC انجام دادهاند [1].
توجه:
برای دانلود فایل کامل ورد لطفا اقدام به خرید نمایید.
لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش تحقیق مرتبط با رشته تخصصی خود بر روی کلید زیر کلیک نمایید.
سفارش تحقیق







دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.