
توضیحات
عنوان فارسی: کنترل موقعیت و سرعت در موتورهای AC
- مقدمه
- بررسی روش های کنترلی
- کنترل اسکالر
- کنترل برداری
- کنترل میدان روتور گرا
- کنترل مستقیم گشتاور
- نتیجه گیری
- مراجع
- مقدمه
در سالهای اخیر، دامنهی كاربرد موتورهای AC در صنایع متنوعی از جمله صنعت برق، گاز، نفت، حمل ونقل، صنایع نظامی و … به دلیل خصوصیات ذاتی آنها توسعهی بیشتری یافته است. چگالی توان بالا، استحكام بالاتر و حجم كمتر، لختی كم، ضریب توان و بازده بالا باعث برتری این ماشین های نسبت به موتورهای DC شده است. مزیت عمده موتور های DC امکان کننترل دقیق سرعت ماشین می باشد، که کماکان در صنایع مختلف به کار گرفته می شود. با پیشرفت علم و تکنولوژی در صنایع الکترونیک قدرت و ادوات الکترونیکی این امکان را برای موتور های AC فراهم آورده است که کنترل دقیقی بر روی سرعت، موقعیت و گشتاور موتور داشته باشد. این امر موجب محبوبیت هر چه بیشتر این نوع موتورها شد و جایگزین خوبی برای موتورهای DC می باشند.
- بررسی روش کنترلی
معمولاً كنترل موتورهای الكتریكی مبتنی بر دو روش اصلی اسكالر و برداری انجام میگرد. ابعاد گسترده تری از محاسن و معایای کنترل میدان روتورگرا (FOC)[1] و كنترل مستقیم گشتاور (DTC)[2] را تبیین می نماید. نتایج مطالعه نشان میدهد، علیرغم اینكه این دو روش كنترلی در گروه كنترل برداری قرار دارند اما دارای تفاوتهای ظاهری بسیاری با یكدیگر بوده و پیادهسازی ساختار DTC در مقایسه با کنترل میدان روتورگرا FOC بسیار سادهتر میباشد. همچنین پس از بررسی جزئیتر مشخص می گردد كه مزایای اصلی DTC در مقایسه با FOC ، دینامیک سریع گشتاور، شار و سادگی پیادهسازی آن میباشد و ضعف DTC درسرعتهای كم و فركانس كلیدزنی متغیر ، از معایب عمده این روش كنترلی است.
- کنترل اسکالر
مطابق رابطه (1) سرعت موتورهای AC، بهطور مستقیم به فرکانس منبع تغدیه بستگی دارد. از آنجا که یک مقدار ثابتی است، لذا کنترل سرعت تنها از طریق تغییر فرکانس منبع امکان پذیر است.
| (1) |
از طرفی با توجه به معادلات (2) و (3) مشاهده میشود دامنه شار با نسبت ولتاژ به فرکانس منبع ولتاژ (V/f) متناسب است. اساس روش اسکالر بر این استوار است که در حین کار موتور و کنترل سرعت، همواره این نسبت ثابت بماند [1].
| (2)
(3) |
در معادلات فوق V، ولتاژمنبع و سرعت موتور هستند.
از دیگر ویژگیهای این روش میتوان به موارد زیر اشاره کرد:
- ساده، ارزان و صنعتی برای کنترل موتورهای AC
- نیاز به جریان راهاندازی کم
- رسیدن به مقدار نامی ولتاژ و جریان در سرعت نامی
- داشتن خاصیت خود سنکرونکنندگی ماشینهای سنکرون و بنابراین عدم نیاز به طرح سیستم حلقه بسته
- بزرگ بودن ناحیه عملکرد تثبیت شده موتور
- امکان به کارگیری موتور درسرعت بالاتر از سرعت نامی با افزایش فرکانس (البته در این حالت امکان افزایش ولتاژ بیش از ولتاژ نامی وجود ندارد و دامنه شار و در نتیجه گشتاور کاهش پیدا میکند)
2- کنترل برداری
در یک ماشین DC، محور آرمیچر و جریانهای میدان و در نتیجه شار میدان و شار آرمیچر همواره بر هم عمودند. از همین رو نیروی محرکه مغناطیسی (MMF[3]) تولید شده در این سیمپیچیها نیز متعامد است. کنترل شار موتورهای DC از طریق کنترل جریان میدان و گشتاور ماشین با صرفنظر از اشباع، بهصورت مستقل از شار میدان، با کنترل جریان آرمیچر تنظیم میشود. برای این کنترل، میتوان از کنترلکنندههای PI استفاده کرد.
مطابق آنچه گفته شد، در ماشینهای DC فقط دامنه جریان کنترل میشود، این در حالی است که در ماشینهای AC چون شار میدان و آرمیچر بر هم عمود نیستند، علاوهبر اندازه جریان، فاز آن نیز باید کنترل شود. بهعبارت دیگر بردار جریان باید کنترل شود، بنابراین روش کنترل برداری خوانده میشود. برای داشتن ساختار کنترلی سادهتر، سیستم به قاب مرجع گردان انتقال داده میشود. هدف از این کار داشتن کنترلی مشابه ماشینهای DC برای ماشینهای AC است. در این حالت بردار جریان به دو مولفه در راستای محور d و q تبدیل میشود. هر کدام از این مولفهها وظیفهای بر عهده دارد: یکی تولیدکننده شار و دیگری تولیدکننده گشتاور. در این حالت چنانچه یکی از مولفهها ثابت باشد و دیگری تغییر کند، این تغییر به سرعت در سیستم اعمال میشود. با این کار ماشین AC پاسخ گذرایی مشابه ماشین DC تحریک مستقل خواهد داشت [3].
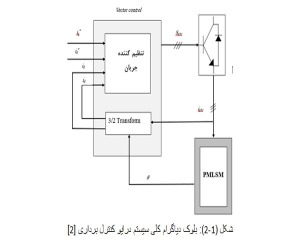
شکل (1) فرم کلی سیستم
درایو یک موتور سنکرون مغناطیس دائم PMSM با استفاده از روش کنترل برداری را نشان میدهد [2].
توجه:
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا استفاده فرمایید.
- لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش تحقیق مرتبط با رشته تخصصی خود بر روی کلید زیر کلیک نمایید.
سفارش تحقیق







دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.