


توضیحات
عنوان فارسی: رباتهای 6 درجه آزادی در علم مكاترونیك
- مقدمه
- مفهوم شش درجه آزادی در مكاترونیك
- تفاوت و ارتباط مكاترونیك و رباتیك
- ساختار پروژههای مرتبط
- به كار گیری بلوکهای پایه در پروژهها
- مكاترونیكِ روباتهای 6 درجه آزادی
- كنترل در یك سیستم رباتیكی یا مكاترونیكی
- اصطلاحات مهم در علم رباتیك با درجات آزادی بالا
- بلوك اصلی ربات چند درجه آزادی
- مكانیك رباتهای 6 درجه آزادی
- مراجع و مآخذ
مقدمه
در دنیای امروزی و حتی در ایران، علوم رباتیك و مكاترونیك بسیار گسترده شده و پیشرفت نموده است. رباتیک، مکاترونیک و هوش مصنوعی کلماتی هستند که این روزها بسیار متداول و رایج گشتهاند؛ برای نمونه در عملگرهای فضایی، خطوط تولید در كارخانههای ماشینسازی، كنترلگرهای بازی و … رشد و فراگیر شدن این زمینهها را بخوبی میتوان دید. هر چند تعاریف این کلمات، بحث انگیز و گاهی همراه با اختلاف نظر میباشند. ایده استفاده از ماشین هایی که قادر به بر آوردن تمامی نیازهای ما را از کارهای دشوار، تکراری و خطرناک رهایی بخشند و همچنین مفهوم خدمتکاران الکترونیکی که میتوانند بدون توقف و هیچ گونه اعتراض یا اعتصاب یا حتی کمترین خستگی برای ما کار کنند همواره به صورت گسترده ای در فیلمهای علمی –تخیلی به کار رفته است. در جایی دیگر، Isaac Asimov ، hugo gernsback و بسیاری از نویسندگان دیگر علمی–تخیلی بیش از دیگران موضوعات مربوط به رباتها، ماشینهای اتوماتیک وهوش مصنوعی را مورد بررسی قرار داده اند. به ویژه مطالعه آثار hugo gernsback که مفاهیم مربوط به الکترونیک را در بسیاری از داستانهای خود به کار برده است، برای خوانندهای که به این قبیل موضوعات علاقه مند باشد بسیار مفید است.
بمنظور یافتن منشا علم رباتیک باید سفری در زمان انجام داده و تا روزگاران یونان باستان یعنی زمانی که اولین مجسمههای متحرک ساخته شدند عقب رفت.
در قرن اول پیش از میلارد hero de Alexandria آزمایشاتی را با پرندههای مکانیکی طرح ریزی و اجرا کرد. بعد از آن تاریخ یعنی حدود سال ۲۷۰ پیش از میلاد به گزارشهایی از cresibus بر میخوریم؛ وی که یک مهندس یونانی بود با استفاده از قطعات متحرک ارگ های بادی و ساعتهای ابی را ساخت. باز هم بعدها در سال ۷۷۰ میلادی یک ساعت ساز سویسی به نام pier gacquet-droz سه آدمک مکانیکی ساخت که قادر به نواختن موسیقی با استفاده از ارگ ترسیم نقاشی های ساده و نگارش بودند. نام دیگری که نمیتوان در تاریخچه علم روبو تیک انرا نادیده انگاشت Nicola tesaa میباشد که یک زیر دریایی مجهز به کنترل رادیویی ساخت .
کلمه روبات برای اولین بار در سال ۱۹۲۱ توسط رمان نویس اهل چکسلوا کی به نام karel kapec در یکی از کتابهای وی به نام r.u.r rassum s universal robots به کار برده شد وی در این کتاب خدمتگزارانی مکانیکی را توصیف نمود که قادر بودند تمامی کارهایی را که یک انسان میتواند بکند انجام دهند؛ در واقع ربات معادل کلمه «کارگر» در زبان چک میباشد.
از آن زمان تا به حال از ربات به عنوان کلمه ای برای توصیف تمامی موجودات مکانیکی که قادر به انجام برخی از کارها که معمولا توسط انسان انجام میگیرد میباشند، استفاده میشود؛ اخیراً بسیاری از نویسندگان، ایده موجودات مکانیکی را مطرح کرده اند که از این جمله میتوان از c-3po r2-d3 مشهور که در سری فیلمهای جنگ ستارگان حضور داشتند نام برد. تصور متداول از یک ربات معمولاً به صورت موجوداتی است که دارای شکل یا رفتاری شبیه به انسانها میباشد. اغلب اوقات رباتهای انسان نما دارای بازو پا و یک سر بوده و قادر به تفکر و گاهی حتی ابراز برخی احساسات میباشد اما برای دانشمندان و مهندسین که با به تفکر و گاهی حتی ابراز برخی “احساسات” می باشد. اما برای دانشمندان و مهندسین که با پروژه های روباتیک سرو کار دارند تصویر عملی یک ربات کاربردی غیر از این موارد است.
ایده ی اصلی یک ربات کاربردی جایگزین شدن با انسان در انجام وظایف و کارهای تکراری و خطرناک یا خسته کننده است. از انجا که کارهای تکراری و خسته کننده ی موجود در دنیای واقعی اغلب در حیطهی ساخت محصولات در یک خط تولید یافت میشود، اولین ایده های استفاده از رباتهای کاربردی در ارتباط با صنعت پدید آمدند. رباتهای صنعتی اولین موجودات واقعی نسل رباتیک بودهاند که به عنوان ماشینهی کاربردی سازنده وسایل به دنیای مدرن ما وارد شدند. امروزه اتومبیلها، وسایل الکترونیکی و لوازم خانگی توسط ماشینهای اتوماتیک یا همان رباتها ساخته میشود؛ این رباتها جایگزین کارگران عادی در خطوط تولید میشوند که این امر مزایای زیادی برای ما دارد.
نقطه جالب توجه در مورد یک ربات عملی در یک خط تولید صنعتی این است که ظاهر این رباتها در بسیاری از مواقع به هیچ وجه شبیه انسان نمیباشد. این دستگاها پا یا سر ندارند ولی در عوض بازوهای زیادی دارند که به اشکال و اندازهای مناسب برای انجام وسایل خاص مورد استفاده قرار میگیرند.
از سویی، امروزه دو علم مکاترونیک و رباتیک در ایران یک علم جدید شناخته میشود، مهندسی مکاترونیک در مقطع کارشناسی و کارشناسی ارشد تدریس میشود ، اما متاسفانه مهندسی رباتیک فقط در مقطع کارشناسی تدریس می شود و خبری از تدریس مهندسی رباتیک در مقطع کارشناسی ارشد حتی در آینده نیز به گوش نمیرسد. این در حالی است که در کشورهای پیشرفته صنعتی دنیا مانند ایالات متحده آمریکا رشته ی مهندسی رباتیک به طور مجزا از مکاترونیک و رشته های دیگر از مقطع کارشناسی تا مقطع پست دکتری تدریس میشود . متاسفانه بعضی ها در ایران این دو رشته را یکی می دانند یا دیده شده است که مهندسی رباتیک را یکی از گرایشهای مکاترونیک نام می برند .
این درست است که یکی از گرایش های مکاترونیک در مقطع کارشناسی ارشد رباتیک است اما رشته های مکانیک طراحی کاربردی ، مکانیک ساخت و تولید ، کنترل ، هوش مصنوعی نیز دارای گرایش رباتیک در مقطع کارشناسی ارشد می باشند . این در حالی است که رشته ی رباتیک با رشته های مکاترونیک ، مکانیک طراحی کاربردی ، مکانیک ساخت و تولید ، کنترل و هوش مصنوعی متفاوت است. چون رباتیک یکی از گرایش های رشته ی مذکور است دلیل نمی شود که رباتیک را زیر مجموعه ی آن رشته بنامیم.
مفهوم شش درجه آزادی در مكاترونیك
بازوها و سیستمهای مستقر در خطوط تولید برای عملگر نهایی با شش درجه آزادی طراحی میگردند. این شش درجه آزادی شامل سه درجه در انتقال (بالا-پایین، چپ-راست و جلو-عقب) و سه درجه در چرخش حول محورهای مختصات (رول، یاو و پیچ) هستند. جزئیات این شش درجه آزادی را میتوان در شكل 1‑1 مشاهده نمود. در حقیقت، 6 درجه آزادی همان آزادی حركت یك جسم صلب در فضای سهبعدی است.
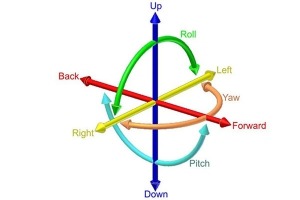
شکل 1 مفهوم درجات آزادی ششگانه
این گونه طراحی، موجب ارتباط مستقیم بین موقعیتهای عملگر و پیكرهبندی بازو میگردد. بازو در رباتها همواره با درجات آزادی آنها توضیح داده میشوند. از سویی، تعداد درجات آزادی، اشاره به تعداد نقاط حركت و چرخش حول محورها در بازو دارد. در واقع، تعداد بالاتر درجات آزادی برای یك ربات یا بازوی مكانیكی دلالت بر انعطاف بیشتر در موقعیتدهی یا موقعیتیابی ابزار و رسیدن به هدف در تولید یا برداشتن جسم دارد. حتی در سال 2007 ، دین كامن یك بازوی ربات با 14 درجه آزادی برای سیستم DARPA اختراع نمود. رباتهای انساننما نیز دارای درجات آزادی 30گانه یا بیشتر هستند؛ 6 درجه در هر بازو، 6 یا 5 درجه در هر پا و چندین درجه آزادی در گردن.
توجه:
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا استفاده فرمایید.
- لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش تحقیق مرتبط با رشته تخصصی خود بر روی کلید زیر کلیک نمایید.
سفارش تحقیق





سید مهدی حسینی –
سلام
خواستم بپرسم در تحقیق شما قوانین دی اچ
سینماتیک مستقیم ومعکوس
ماتریس ژاکوبین
دینامیک و…
اومده که اقدام به خرید کنم
سپاس
یک دو سه پروژه –
سلام. وقت بخیر. فهرست مطالب تحقیق در صفحه محصول گذاشته شده و طبیعتا مواردی که در فهرست وجود ندارد به آنها پرداخته نشده است.
موفق باشید