

توضیحات
پروژه آموزشی طراحی کنترل کننده ثابت نگه داشتن و پایدار سازی آونگ با متلب
هدف:
- مدلسازی دینامیکی
- بررسی کنترل پذیری
- بررسی رویت پذیری
- کنترلر PD و PID
- کنترلر فیدبک حالت
- گسسته سازی معادلات
- کنترل دیجیتال
- طراحی رویتگر
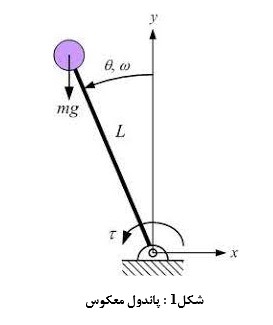
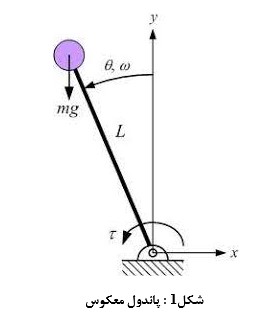
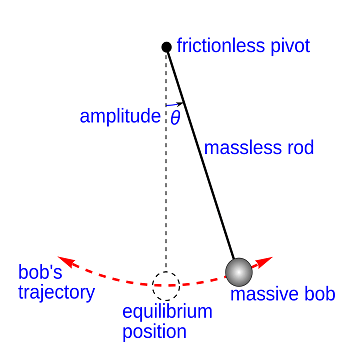
برای آونگ معکوس شکل ۱. هدف از طراحی کنترل کننده ثابت نگه داشتن و یا پایدار سازی آونگ حول نقطه تعادل است.
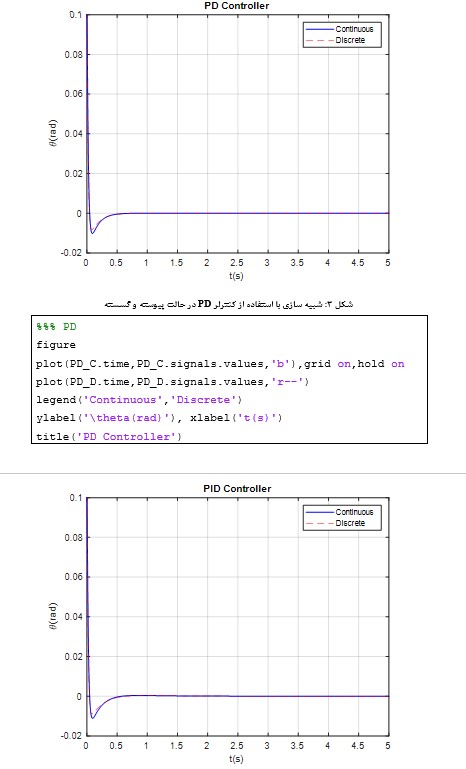
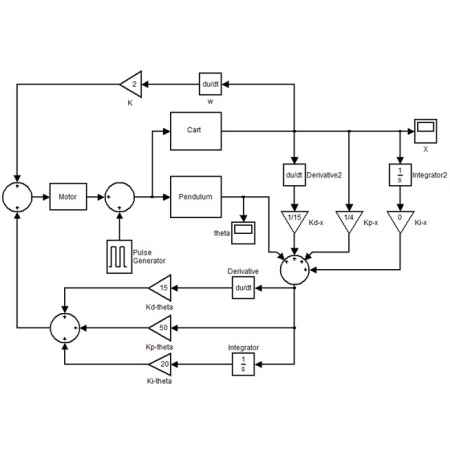
در شبیه سازی سیستم کنترل کننده هایPD، PID و فیدبک حالت برای هر دو سیستم پیوسته و گسسته پیاده سازی شدهاند. در فایل سیمولینک، زیرسیستم PID شامل شبیه سازی سیستم در حالت پیوسته و سپس پیادهسازی سیستم با کنترلر PID گسسته است. نتایج حاصل از شبیه سازی در شکل ۳ نشان داده شده است. همانطور که مشاهده می شود نتایج در هر دو حالت پیوسته و گسسته به سمت صفر میل می کند و سیستم پایدار می شود و خروجی سیستم در حالت گسسته دارای خطای کمی نسبت به حالت پیوسته است

فهرست مطالب پروژه آموزشی
هدف: 4
مدلسازی: 4
گسسته سازی: 5
سیستم حلقه باز: 6
سیستم حلقه بسته: 7
کنترلر و رویتگر: 7
نتایج شبیه سازی: 8
فهرست اشکال
شکل 1: پاندول معکوس… 4
شکل 2: شبیه سازی سیستم حلقه باز 6
شکل 3: شبیه سازی با استفاده از کنترلر PD در حالت پیوسته و گسسته. 9
شکل 4: شبیه سازی با استفاده از کنترلر PID در حالت پیوسته و گسسته. 10
شکل 5: فیدبک حالت بدون رویتگر (سیستم پیوسته و گسسته) 11
شکل 6: فیدبک حالت با رویتگر (سیستم پیوسته و گسسته). 12
پروژه آموزشی طراحی کنترل کننده ثابت نگه داشتن و پایدار سازی آونگ با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.