
توضیحات
فهرست
مقدمه. 3
شرح سیستم. 3
مدل سازی سیستم. 4
اهداف مقاله. 5
فصل اول- بررسی وضعیت فعلی سیستم (سیستم حلقهباز) 6
بررسی قطبها و صفرها 6
پاسخ سیستم به پله، ضربه و اغتشاش.. 6
جمعبندی و تحلیل سیستم حلقه باز 9
فصل دوم- نمودار بود. 10
رسم دیاگرام بود. 10
رسم نمودار بود با حل عددی.. 11
بدست آوردن تابع تبدیل به روش تجربی.. 12
فصل سوم- مکان هندسی قطبهای حلقه بسته. 13
فصل چهارم- طراحی کنترلر. 15
مقدمهی کنترلر PID.. 15
طراحی کنترلر با تغییر پارامترهای PID.. 16
معیار پایداری نایکوئیست.. 18
مقدمه
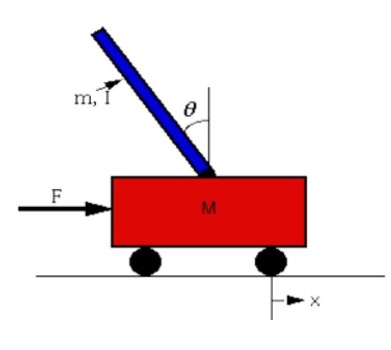
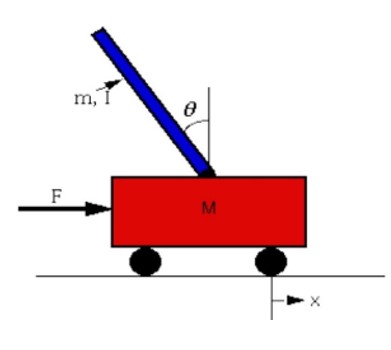
شرح سیستم
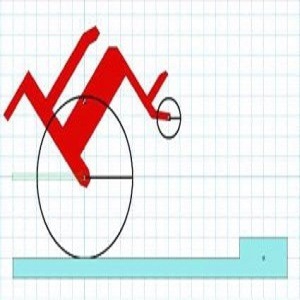
در این مقاله با مسئلهی معروف پاندول معکوس روبرو هستیم. هدف از مسئله پاندول معکوس کنترل مکان زاویهای پاندول با وجود اغتشاشات و ورودیهای ناخواسته است. این فرآیند کنترلی باید در زمان مشخص و با کمترین میزان خطا انجام شود.
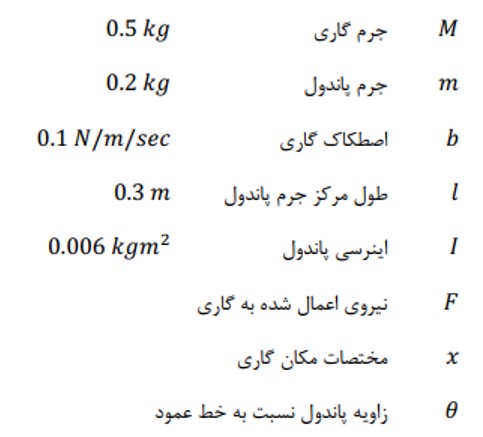
ثوابت مسئله به صورت زیر هستند:
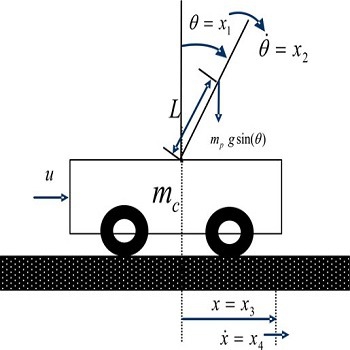
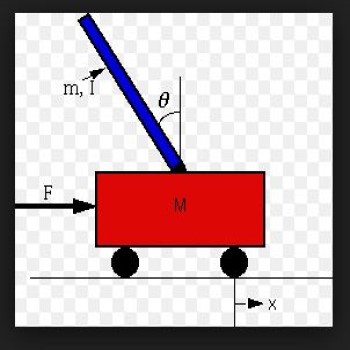
مدل سازی سیستم
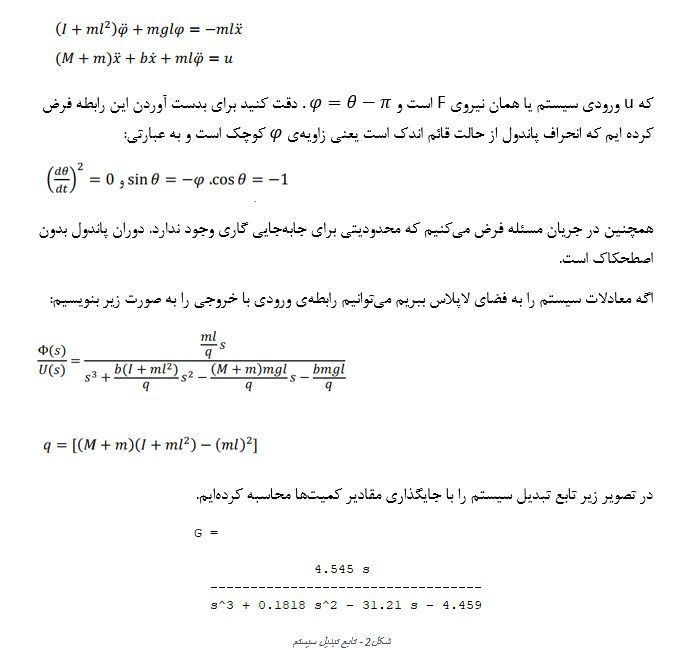
معادلات حاکم بر سیستم پاندول معکوس به صورت زیر هستند:

اهداف مقاله
هدف اصلی مقاله طراحی کنترلریست که بتواند در حضور ضربهی یک نیتونی در زمان کمتر از 5 ثانیه پاندول را به حالت قائم برگرداند و اجازهی انحراف بیش از 0.05 رادیان به پاندول ندهد.
در فصل اول رفتار سیستم مدار باز را بررسی میکنیم. به این معنا که وضعیت پایداری سیستم بدون حضور کنترلر چگونه است و آیا سیستم را میتوان به صورت حلقهباز (بدون فیدبک) به سمت نقطهی مطلوب کنترل کرد.
در فصل دوم نمودار بود را برای سیستم حلقه باز رسم میکنیم. نمودار بود از ابزارهای مهمی است که پاسخ سیستم به ورودیهای فرکانسی مختلف را نمایش میدهد.
در بخش سوم وارد مدار حلقه بسته میشویم و وضعیت پایداری سیستم را با حضور کنترلر تناسبی بررسی میکنیم.
در نهایت در بخش چهارم کنترلر PID مناسب را برای خواستهی نهایی مسئله طراحی میکنیم. پایداری سیستم مدار بسته را از طریق رسم نمودار نایکویست بررسی خواهیم کرد.
فصل اول- بررسی وضعیت فعلی سیستم (سیستم حلقهباز)
بررسی قطبها و صفرها
سیستم دینامیکی با تابع تبدیل توصیف میشود که رابطهی بین ورودی و خروجی سیستم در فضای لاپلاس است. به ریشههای صورت تابع تبدیل صفر و به ریشههای مخرج آن قطب میگویند. مکان قطبها و صفرها در رفتار گذرا و پایدار سیستم بسیار موثر هستند. به طور مثال اگر تنها یک قطب در سمت راست محور موهومی داشته باشیم پاسخ پایدار سیستم به ازای ورودی پلهی واحد به بینهایت میل خواهد کرد.
حال به سراغ تحلیل مسئله پاندول معکوس میرویم. همونطور که دیدیم ریشه صورت مقدار صفر است بنابراین تنها یک صفر (ریشه) داریم که در مبدا است.
برای پیدا کردن قطبها یعنی ریشههای عبارت درجه سه از متلب کمک میگیریم (کدA1). خروجی مطلب به صورت زیر است:
پروژه آموزشی کنترل مکان زاویه ای پاندول معکوس با وجود اغتشاشات ناخواسته با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.






parsa –
رفرنس ها رو هم گفتین توی پروژه که مثلا این مقادیر و معادلات از کجا اومده؟ کد ها و شبیه سازی ها هم توی فایل هست؟