توضیحات
پروژه آماده کنترل خطی با متلب توسط متخصصین گروه مکانیک یک دو سه پروژه انجام شده است.
عنوان پروژه: کنترل یک سیستم پاندول معکوس
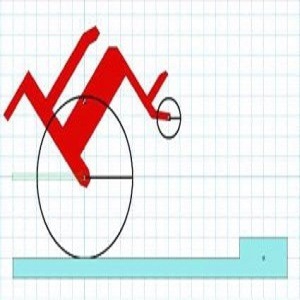
شرح: شخصی معلول سوار بر ویلچر میخواهد برای عبور از مانعی چرخهای کوچک جلوی ویلچر را بالا آورده و کمک گرداندن چرخ بزرگ، این وضعیت را حفظ نماید. تا بتواند چرخ جلو را از مانع عبور دهد و آن را بر روی مانع قرار دهد. میخواهیم وضعیت معلق این شخص سوار بر ویلچر را شبیهسازی کنیم و برای قرارگیری در وضعیت تعادل، آن را کنترل نماییم:
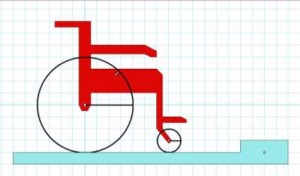
شکل ۱: ویلچر در حالت عادی
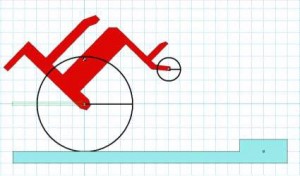
شکل ۲: ویلچر در حالت معلق
سیستم معادل این ویلچر پاندول معکوسی است که به چرخی متصل است و میتوان مدل آن را بصورت شکل ۳
در نظر گرفت.
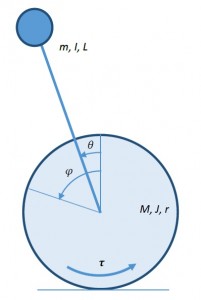
شکل ۳: مدل شماتیک ویلچر بصورت مدل پاندول معکوس
در این شکل، جرم m مربوط به مرکز جرم مجموعه بیمار و ویلچر (منهای چرخ) است که از محور چرخ به فاصله L قرار گرفته است؛ همچنین مجموعه ویلچر و بیمار دارای لختی دورانی I هستند. همچنین چرخ دارای شعاع r و جرم m و لختی دورانی I است. به کمک وارد نمودن گشتاور ? به چرخ باید بتوانیم آن را کنترل نماییم.
موارد انجام شده در پروژه:
- معادله دینامیکی کلی حاکم بر سیستم فوق
- خطی سازی مدل فوق حول نقطه کاری تعادل عمودی (?=۰)
- بدست آوردن مدل فضای حالت سیستم خطیسازی شده فوق. خروجی این سیستم زاویه ? و ورودی آن گشتاور? است.
- بدست آوردن مقادیر ویژه سیستم فوق و بحث در مورد پایداری این سیستم.
- بدست آوردن تابع تبدیل سیستم از مدل فضای حالت فوق.
- بحث در مورد پایداری سیستم با بررسی قطبهای تابع تبدیل فوق.
- سیستم را بصورت مداربسته و بادرنظرگیری کنترلرP-action -7 درنظر بگیرید. عمل کردن به روش راوث در مورد مقادیر بهره K که میتواند سیستم را پایدار نماید.
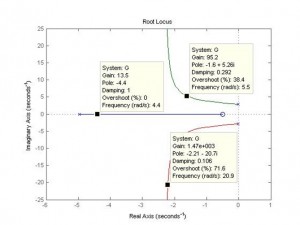
- بحث در مورد مقادیر K برای پایداری سیستم و ترسیم مکان هندسی ریشه ها.
- تغییر کنترلر را به PID
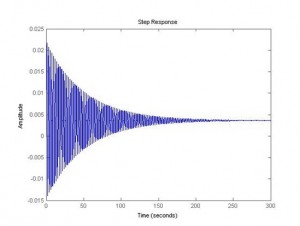
- شبیه سازی مدل دینامیکی فوق در نرم افزار متلب
- و…
تصاویری از نمودارهای استخراج شده با متلب
این محصول دارای فایل راهنما با فرمت وُرد و فایل متلب مربوط به کد نویسی است که بعداز خرید محصول قابل دریافت میباشند.




Faezeh –
سلام ما این پروژه رو فقط استفاده از کنترلر پی ای دی برای پاندول معکوس میخواهیم میشه قسم های دیگه حرف بشن؟
خیلی خوبه
یک دو سه پروژه –
سلام دوست عزیز. متاسفانه امکانش نیست.