

توضیحات
پروژه شبیه سازی کنترل کننده غیرخطی توربین بادی با متلب:
نحوهی طراحی کنترلر
در مقالهی مورد بررسی ابتدا معادلات حالت حاکم بر سیستم با استخراج معادلات دینامیک سیستم به دست آورده شدهاند:

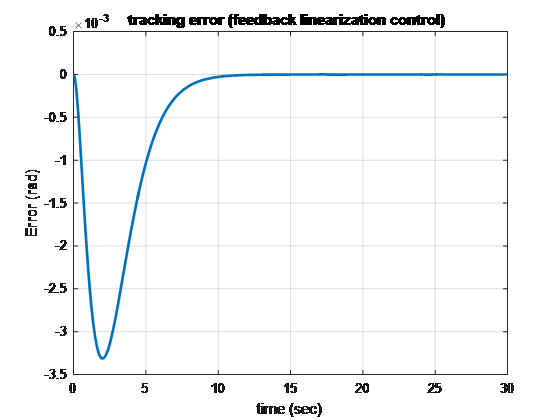
هدف طراحی کنترلر پسخوراند خطیساز است به گونهای که بتوان خروجی این سیستم یعنی یا همان را کنترل کرد. بدین منظور لازم است از خروجی (y) آن قدر مشتق گرفته شود تا جایی که ورودی سیستم (u) در معادلات ظاهر شوند. در اولین معادلهای که ورودی سیستم ظاهر شد، درجهی نسبی سیستم برابر خواهد بود با مرتبهی مشتق y در آن معادله. همانطور که میبینیم در معادلات 12 مقاله، عملیات مشتقگیری از y انجام شده است و میبینیم که در مشتق سوم از y، u ظاهر شده است. بنابراین درجهی نسبی سیستم با مرتبهی سیستم برابر شده است و در نتیجه سیستم، کاملاً قابل خطیسازی است و مرتبهی معادلهی دینامیک داخلی سیستم صفر است. معادلات دینامیک خارجی سیستم برابر خواهند بود با:
یا به عبارت دیگر:

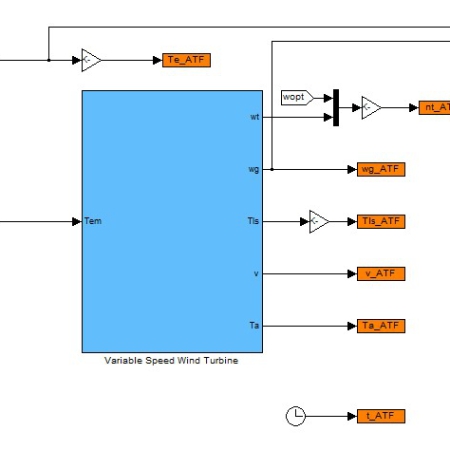
شبیهسازی کنترلر با استفاده از متلب
برای شبیهسازی در متلب کدی که نوشته شده است به صورت حل معادلات حالت (که در کل یک معادلهی ODE میباشند) با استفاده از دستور ode45 متلب است. بدین منظور ابتدا یک function تعریف کرده که در این function هدف وارد کردن معادلات حالت (و یا رابطهی بین x با x ) است.
(function dy = feed_lin(t,y
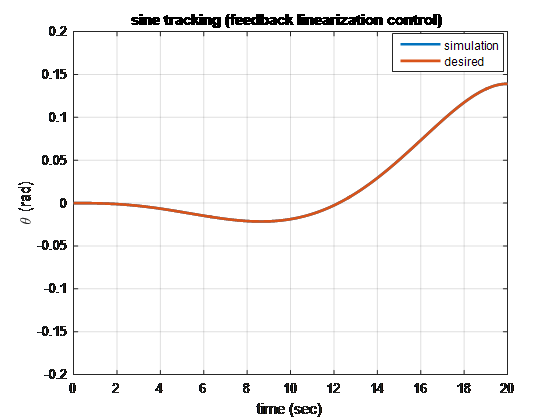
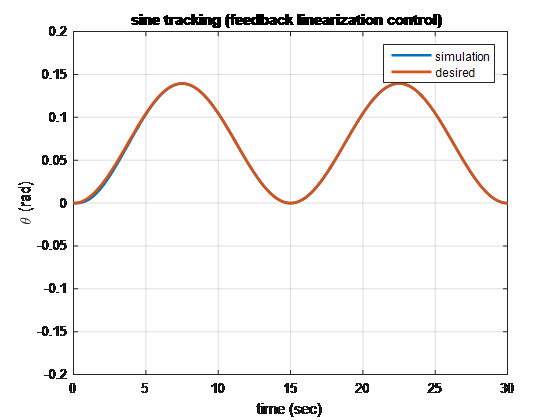
ورودیهای این تابع، متغیرهای حالت و زمان میباشند. در ابتدا باید مسیر دلخواه (مرجع) برای ردیابی y و هم چنین مشتقات متوالی آن تا مشتق سوم را وارد کرد، که مثلاً برای مسیر سینوسی با فرکانس 66/0 هرتز و دامنهی 8 درجه به صورت زیر است:
%% desired path
yd = 4*pi/180*sin(4*pi/30*t+3*pi/2)+4*pi/180;
yd_t = (4*pi/30)*4*pi/180*cos(4*pi/30*t+3*pi/2);
yd_tt = -(4*pi/30)^2*4*pi/180*sin(4*pi/30*t+3*pi/2);
yd_ttt = -(4*pi/30)^3*4*pi/180*cos(4*pi/30*t+3*pi/2);
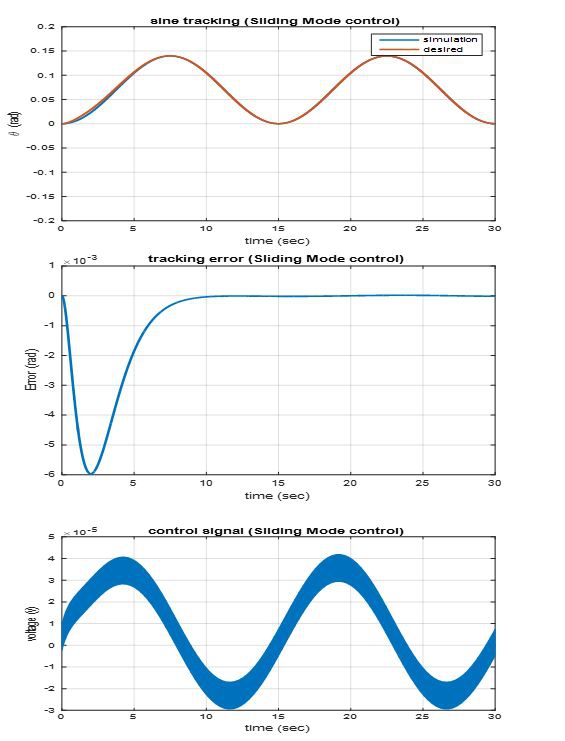
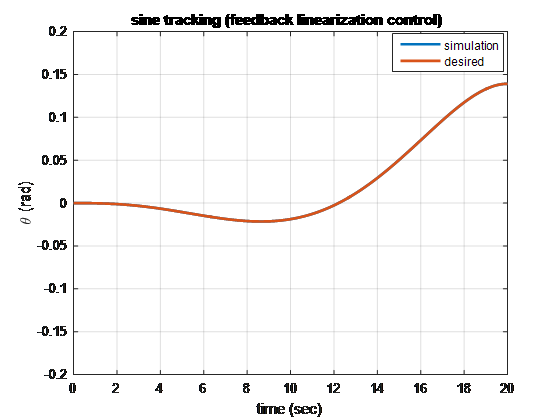
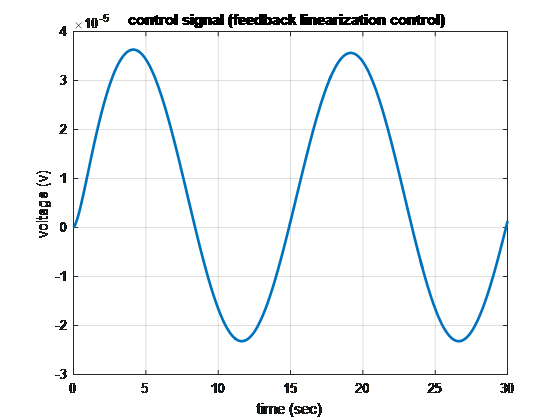
تصاویر پروژه شبیه سازی کنترل کننده غیرخطی توربین بادی با متلب
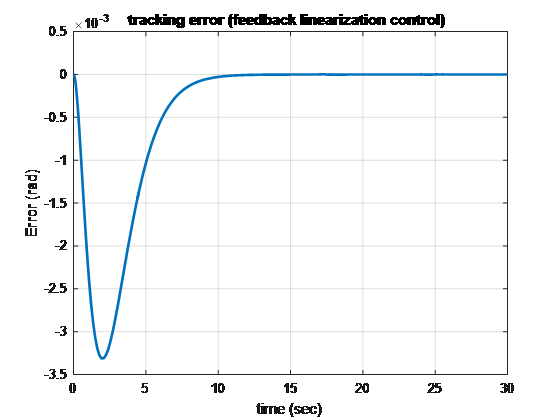
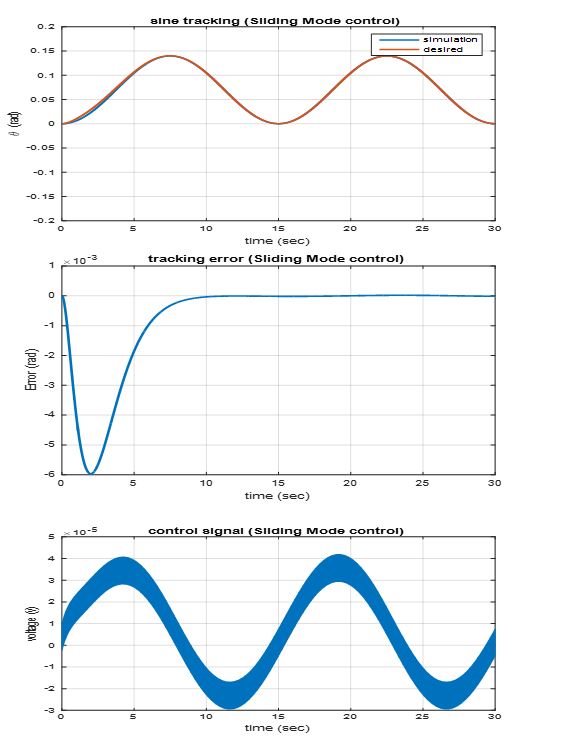
 تصویر نتایج پروژه
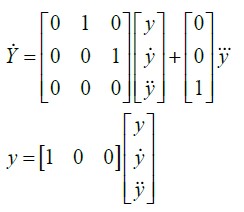
تصویر نتایج پروژه

 تصویر نتایج پروژه
تصویر نتایج پروژه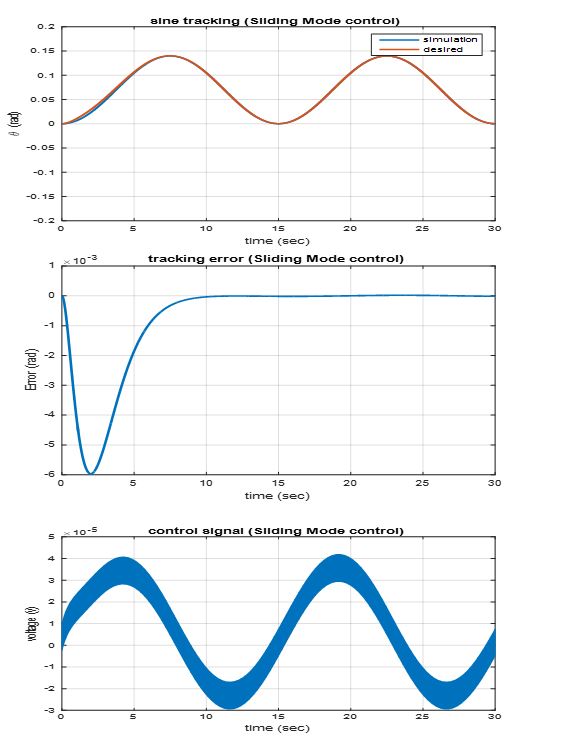
- شبیه سازی کنترل کننده غیرخطی توربین بادی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





سید –
عالی