




توضیحات
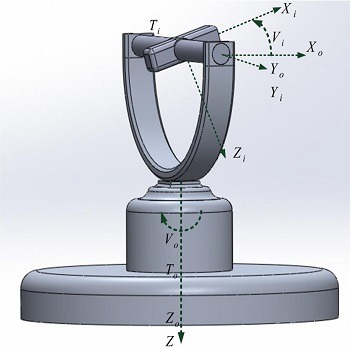
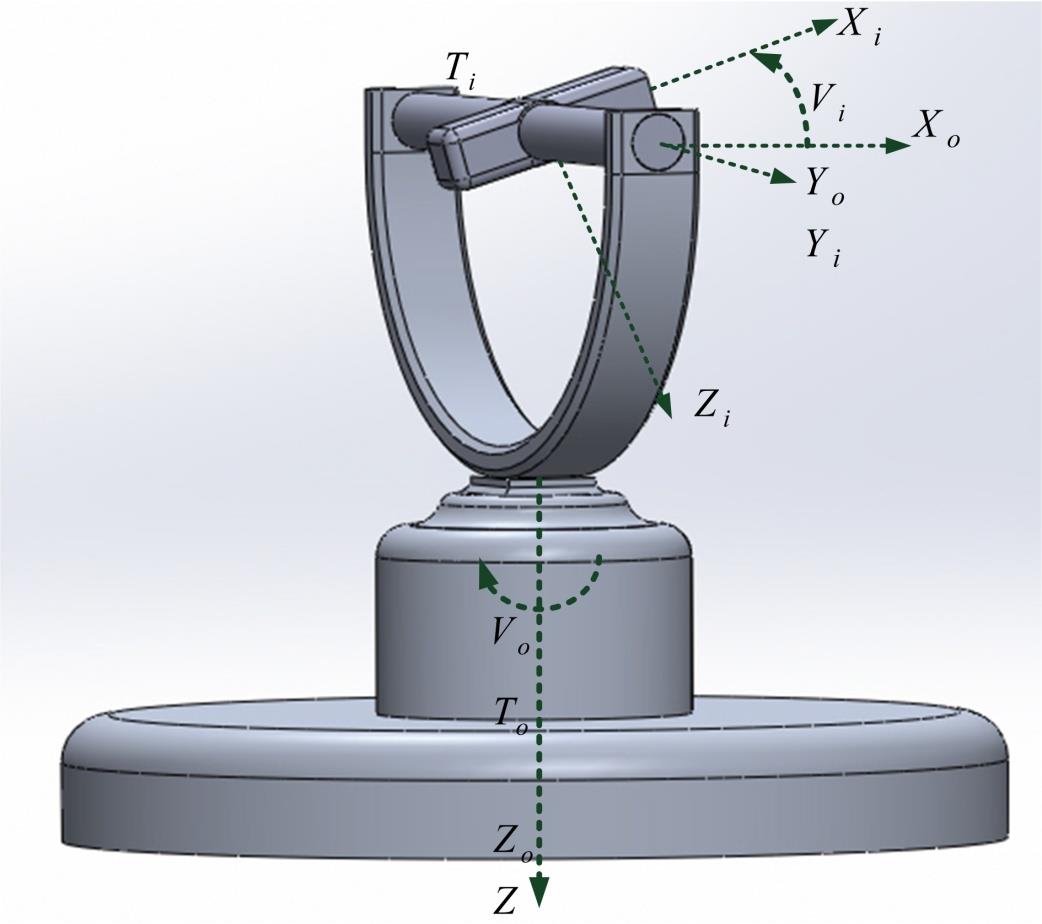
در این پروژه جهت پایدار سازی و کنترل یک سکوی دو درجه آزادی یک کنترل کننده مد لغزشی طراحی و شبیهسازی شده است. این کنترل کننده باید تمامی اغتشاشات وارد بر سیستم که شامل نیروی اصطحکاک میان بلبرینگهای نصب شده بر روی طوقه ها و اغتشاشات بدنهی سکو است را به خوبی از بین ببرد. با خواندن سرعت زاویهایی طوقهها توسط ژیروسکوپها و ارسال آنها به کنترل کنندهها سیگنالهای لازم جهت ردیابی سیگنال فرمان به موتورهای گشتاورساز داده میشود.
در ابتدا مدلهای اجزای بهکار رفته در یک سکوی دو درجه آزادی را معرفی و سپس به کنترل و پایدار سازی آن میپردازیم.
مدل موتور جريان مستقيم مغناطيس دائم در حضور حرکت بدنه:
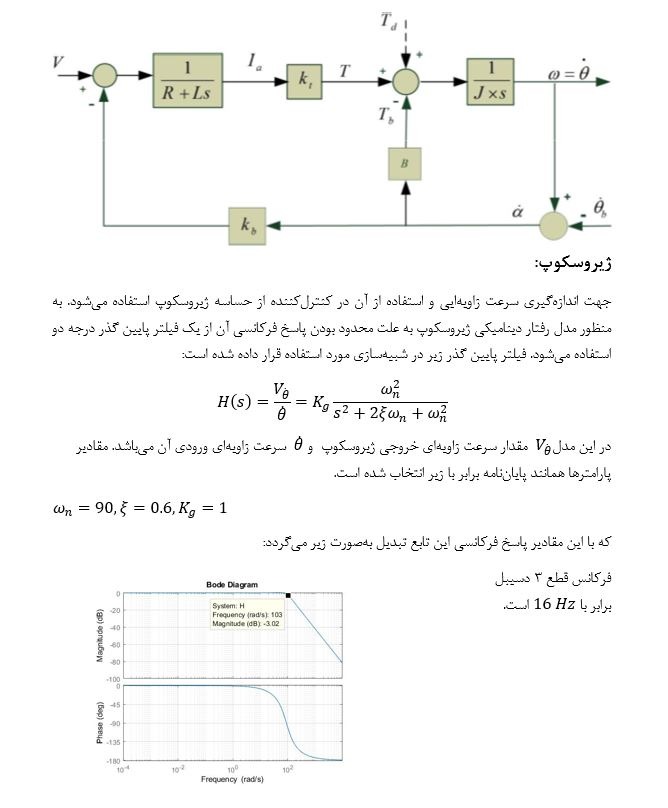
مدل موتور گشتاور ساز در شکل زیر آورده شده است: در این شکل R و L به ترتیب مقاومت و اندوکتانس سیمپیچ آرمیچر ، ضریب حساسیت ولتاژ، ضریب حساسیت گشتاور، 𝐽 کل ممان لخت قسمت دوار موتور و بار حول محور دوران و B نیز ضریب اصطکاک ویسکوز بین بدنه و قسمت دوار موتور است.همچنین 𝑉 ولتاژ آرمیچر، جریان سیم پیچ آرمیچر، T گشتاور الکترومغناطیسی موتور و 𝜔سرعت زاویهای قسمت دوار موتور میباشد. بیانگر اغتشاشات وارد بر موتور و نیز گشتاور حاصل از اصطحکاک است و همانطور که مشاهده میشود در خلاف جهت گشتاور اعمالی است.
در اثر اثرات نامیزانی جرم، عدم تلاقی محورهای دوران طوقه ها، عدم قطری بودن ماتریس ممان اینرسی، تزویج بین طوقهها، تلفات موتور و کلیه عوامل ناخواسته مدل نشده در سیستم ایجاد میشوند.
به دلیل حرکت بدنه نسبت به مرجع لخت، سرعت زاویهای موتور نسبت به مرجع لخت با سرعت زاویهای آن نسبت به بدنه متفاوت است. اگر سرعتهای زاویهای موتور و بدنه را نسبت به مرجع لخت، به ترتیب و سرعت زاویهای موتور نسبت به بدنه را α̇ بنامیم، سرعت زاویهای کنترل شده توسط موتور همان بوده و واصطکاک نیز متناسب با خواهد بود.
در این شکل به منظور اصطحکاک را به صورت ویسکوز مدل نموده است. هرچند در شبیهسازی استفاده از مدل کولمبی نیز کفایت مینماید.
مدل اصطحکاک:
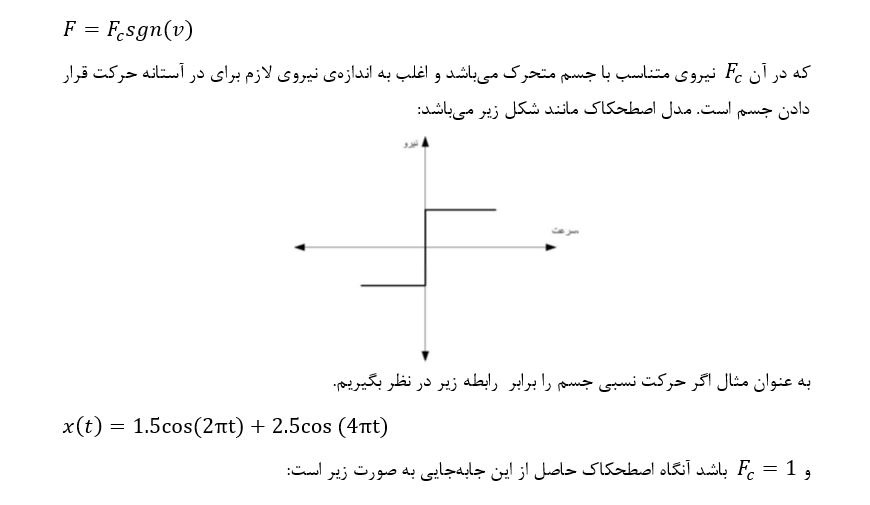
در این طراحی از مدل کلاسیک اصطحکاک به نام اصطحکاک کولمبی استفاده شده است.در این مدل فرض بر ایناست که اولاً اصطکاک با حرکت مخالفت میکند و ثانیاً دامنه نیروی اصطکاک از اندازه سرعت و سطح تماس جسم، مستقل باشد.این مدل را میتوان توسط رابطه زیر بیان نمود:
که در آن نیروی متناسب با جسم متحرک میباشد و اغلب به اندازهی نیروی لازم برای در آستانه حرکت قرار دادن جسم است. مدل اصطحکاک مانند شکل زیر میباشد:
چکیده:
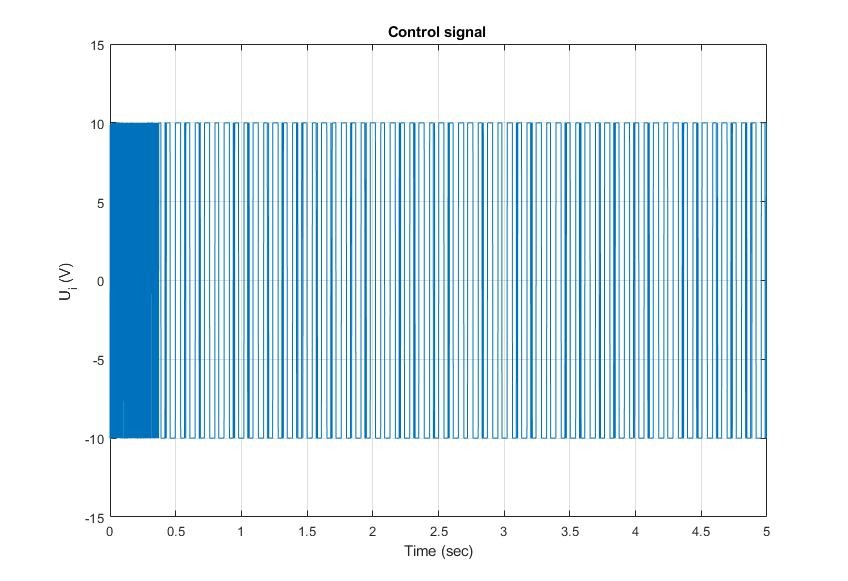
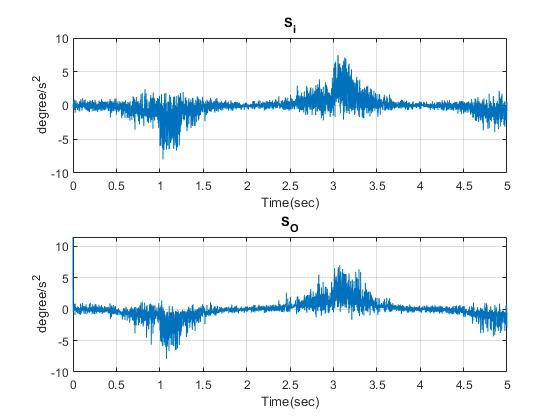
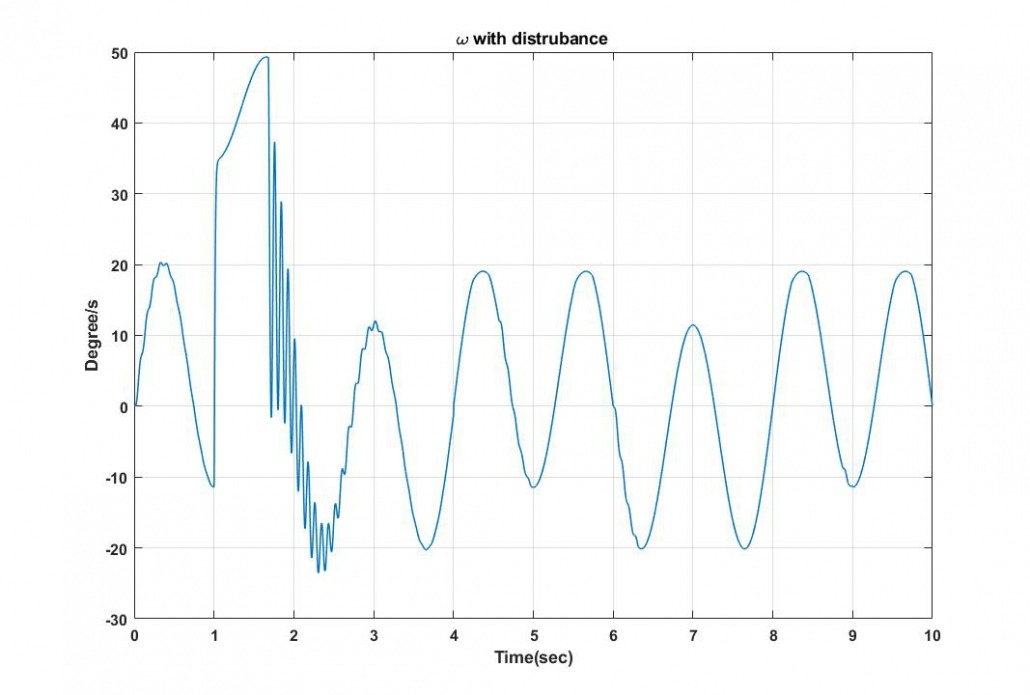
در این پروژه پایدارسازی سکوی دو درجه آزادی به صورت سخت افزاری مورد تحلیل قرار گرفت.سیستم مورد نظر برای پایدارسازی خط دید طوقه ی داخلی، باید اغتشاشاتِ وارد شده بر بدنه را تا حدامکان کاهش دهد. اجزای اصلی این سیستم شامل طوقه ها، حساسه ی سرعت زاویهای و موتورهای گشتاور ساز میباشند. حساسه انتخاب شده از نوع ژیروسکوپ نرخی الکترومکانیکی (MEMS) و مولدهایگشتاور نیز از نوع موتور جریان مستقیم با مغناطیس دائم میباشند. استخراج پارامترهای مدل سیستمبه روش عملی انجام شده است. روابط و معادلات لازم برای مدلسازی هر یک از اجزای سیستم فوق دراین مقاله آورده شده است. با توجه به تاثیر پدیده اصطکاک در بلبرینگ موتورها و همچنین طوقه ها،مدلسازی اصطکاک نیز مدنظر قرار گرفته است. شبیه سازی پایداری سیستم با در نظر گرفتن روابط ریاضی و پارامترهای اجزای سکو، صورت پذیرفت، به منظور دقت بیشتر در طراحی فرض کردیم که به سکوی مورد بررسی لرزشی بافرکانس و دامنهی مشخص حول سه محور مختصات( x,y,z) وارد میشود. در این حالت، تغییرات خط دید بدون اعمال سیگنال فرمان در هر سه جهت مقایسه شد. در قسمت شبیه سازی از کنترلگر تناسبی،تناسبی انتگرالی استفاده شده است. همچنین جهت بررسی ردیابی هدف توسط طوقهی داخلی، سیگنال- فرمان به ورودی سیستم اعمال شد. سیگنال فرمان اعمال شده در دو جهت سمت برای طوقه ی خارجی وارتفاع برای طوقه ی داخلی میباشد.
شبیه سازی و طراحی میز دو درجه آزادی x-y و کنترل کننده اسلایدینگ مود با نرم افزار متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.