
توضیحات
پروژه شبیه سازی تنظیم کنترل کننده PID با الگوریتم کریل هرد با متلب:
فایل شبیهسازی الگوریتم و نتایج آن در این پروژه ضمیمه شده است.
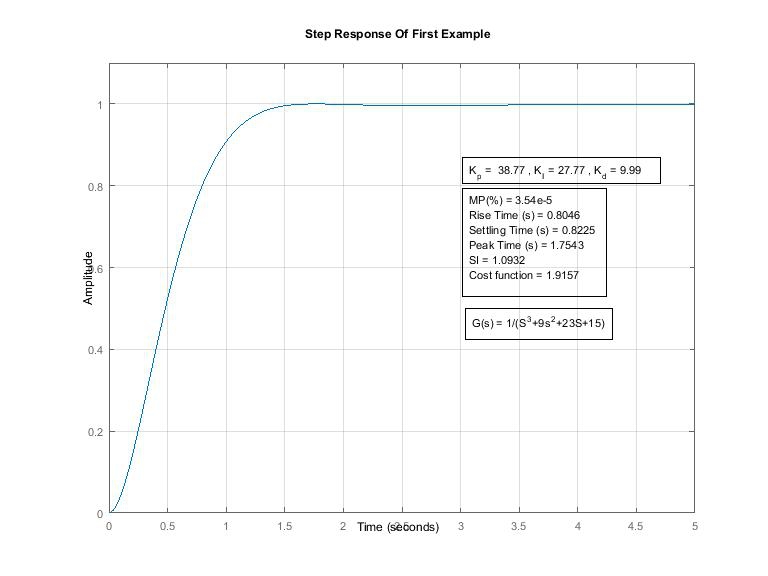
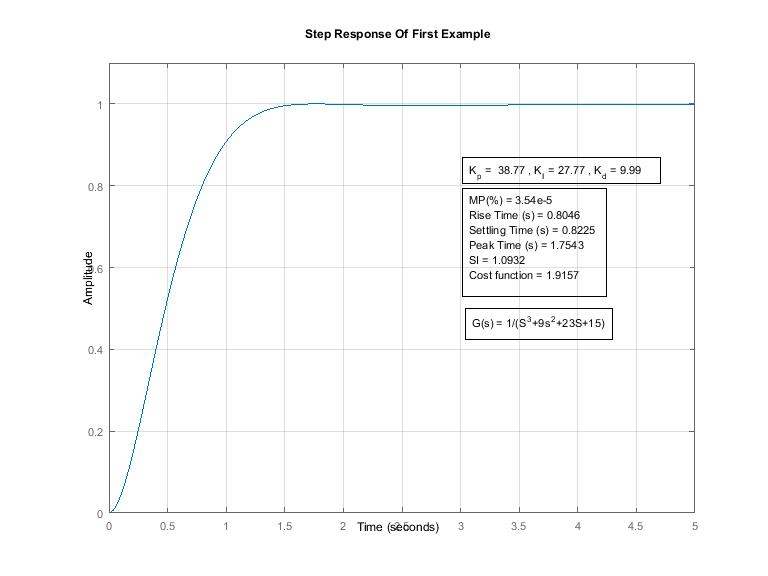
در مثال اول که تابع تبدیل درست داده شده است نتایج ار نتایج بدست آمده در مقاله نیز بهتر میباشد.
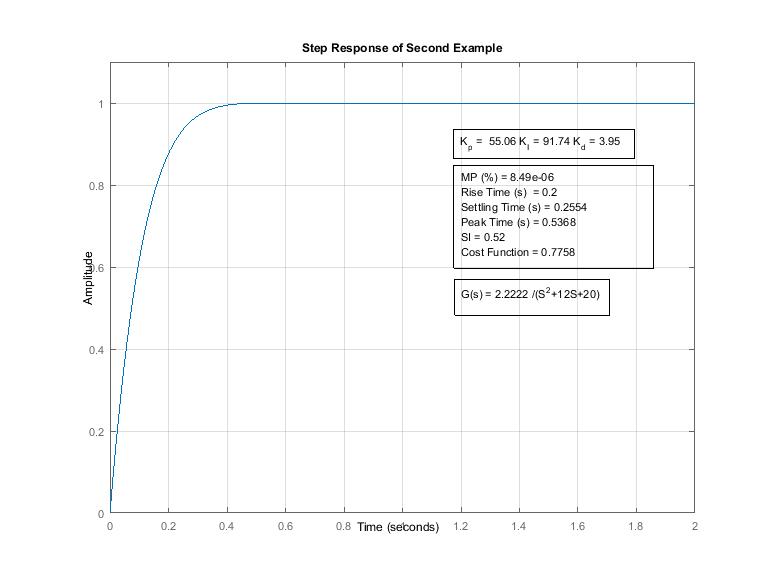
توجه داشته باشید که نتایج نشان داده شده برای سیستم مثال ۲ در مقاله مربوط به تابع تبدیل گفته شده در آن مثال نیست به همین علت تابع تبدیلی برای این مثال انتخاب شده است که تقریبا پاسخ بدون کنترل کنندهی آن شبیه نتایج مثال ۲ باشد.
علت تغییرات اندک در نتایج بدست آمده برای این مثال نیز همین است.
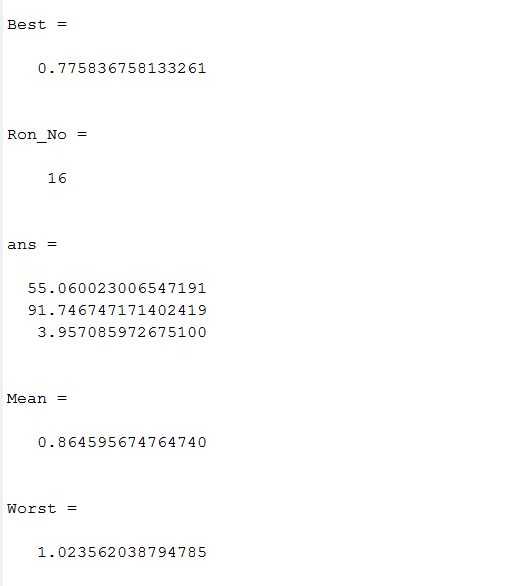
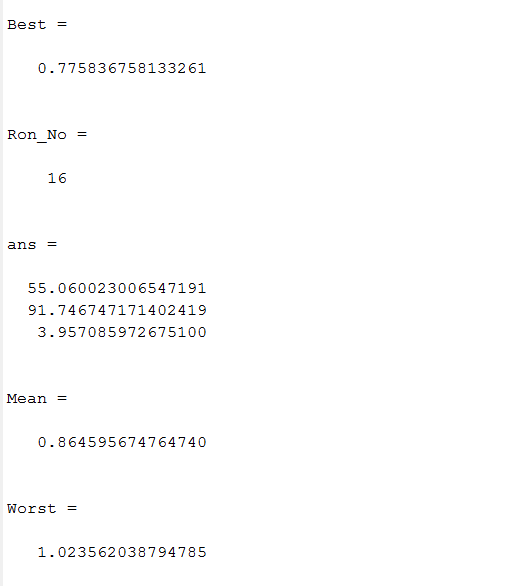
الگوریتم کریل معرفی شده در مقاله که در این مقاله مقداری نیز بهبود داده شده است به طور کامل شبیهسازی شده و ضرایب بدست آمده برای کنترلر از نتایج ران آن بدست آمده است.
الگوریتمهای معرفی شدهی دیگر نیز که بهینه سازی توسط آنها نیز انجام شده است تنها برای مقایسه آمده اند و جز روند شبیهسازی این مقاله نمی باشند (هر کدام مقالهی جداگانهایی هستند).
در این مورد تمام نتایج روش ارايه شده در مقاله در نمودار شما آورده شده است.
تصویر نتایج پروژه شبیه سازی شده تنظیم کنترل کننده PID:
نکات قابل ذکر:
- شبیه سازی تنظیم کنترل کننده PID با الگوریتم کریل هرد با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




نقد و بررسیها
هنوز بررسیای ثبت نشده است.