توضیحات
عنوان فارسی: طراحی دستگاه تنظیم کننده ی خودکار برای سیستم های قدرتی PID با سیستم های قدرتی چند ماشینه
عنوان انگلیسی مقاله:
DESIGN OF SELF-TUNING PID POWER SYSTEM STABILIZER FOR MULTIMACHINE POWER SYSTEMS
خلاصه:
یک دستگاه تنظیم کننده ی خودکار سیتم های قدرتی PID برای بهبود دادن به ثبات دینامیکی سیستم های قدرتی چند ماشینه در طیفی گسترده در شرایط عملیاتی ارائه میشود.به منظور حفظ تعادل مشخصه های مخلف سیستم در هنگام وقوع تغییرات شدید در شرایط عملیاتی،نتیجه ی تنظیمات در زمان واقعی سازگاری پیدا میکنند بر اساس اندازگیری مداوم ورودی و خروجی های سیستم.دستگاه تثبیت کننده ی کنترل خودار پیشنهاد شده داری ساختاری غیر متمرکز و همچنین فقط دارای اندازگیری های موضعی در داخل هر واحد سازنده ی مورد نیاز برای فرایند سازگاری می باشد.اثربخشی تثبیت کننده ی پیشنهاد شده با مثال نمایش داده شده است .
مقدمه :
کاربرد سیستم تثبیت قدرت برای بهبودی بخشیدن به پایداری دینامیکی به یک سیستم قدرتی با مسیر های انتقال طولانی و واحد های مولد بزرگ دارای بهره بری بالا ، سرعت عمل و سیستم استراتژی های موثر به مدت بیش از دو دهه موردتحقیق قرار گرفته است.نتیجه ی تنظیمات این ثبیت کننده ها معمولا بر روی مجموع ای از مقادیر کشخص بر اساس نقاط عملیاتی خاص جایگزاری می شود.به عنوان یک نتیجه برای این دستارودهای تثبیت جایگزاری شده حفظ بهترین تعادل در کارایی سیستم در هنگام وقوع تغییرات شدید در موقعیت عملیتاتی غیر ممکن می باشد ،مثلا امکان نتیجه گیری در حالت وجود سه بخش اشتباه در سیستم قدرتی. به منظور غلبه بر این مشکل ، از یک دستگاه تنظیم تثبیت خودکار که داری معدل تنظیمات به دست اورده در زمان واقعی است برای برای تغییر مسیر شرایط عملیاتی میتوان استفاده کرد.این دستگاه تثبیت خودکار که برای حفظ تعادل و تغییر مسیر در شرایط عملیاتی کارامد نشان داده شده ،اساساً تثبیت کننده ی سنتز و درامیز سنیگنال هاست که در آن یک پایدار کننده ی سیگنال ،از سیگنال های تولید شده با استفاده ا ز به حداقل رساندن متغییر ها یا تغییر قطب سنتز شده است. اخیرا یک تثبیت کننده ی تنظیم خودکار از ساختار PID پیشنهاد شده است.به همراه یک تنظیمات به دست امده ی معدل باتوجه به قانون سازگاری خاص. این تثبیت کننده اساساً یک کلیت بخشی به نتایج جایگزاری کنترل کننده ی PID می باشد،که بسیار دور از دسترس است ،بخش اعظم استفاده ی طراحی کنترل کننده به دلیل ساده و موثر بودن آن می باشد.درگذشته کار بر روی تثبیت کننده ی تنظیم خودکار PID منحصراً بر روی سیستم ماشین باس بینهایت تمرکز داشت .برای یک سیستم قدرتی کاربردی با تعداد مولد های زیاد و پیوسته با استفاده از خطوط انتقال EHV ، تعامل میان مولد های منحصر به فرد ممکن است اثر پاسخ های سیستم برای یک گسترش بزرگ باشد و سیستم ماشین باس بینهایت به تنهایی نمی تواند به کار برده شود. در واقع این پیشناد این مقاله برای گسترش دستاورد های قبلی یک سیستم چند ماشینه ی قدرتی می باشد.به علاوه یک تکنیک انتقال قطبی که با متد گماردن قطبی متفاوت است و الگریم کاهش اختلافات که در مقاله ی قبلی به ثبت رسید توسعه داده می شود، برای تنظیم پرامتر های تثبیت کننده. نتایج ارائه شده در این مقاله نشان می دهد که تنظیم کننده ی خودکار سیستم تثبیت قدرتی PID متواند کاریی بهتری نسبت به سیستم های تثبیت قدرت مروسوم ارائه دهد در هنگامی که سیستم قدرتی درمعرض یک اختلال عمده که نتیجه ی یک تغییر شدید در شرایط عملیاتی سیستم میباشد. تثبیت کننده ی پیشنهادی به اسانی جایگزاری میشود زیرا ساختار تثبیت کننده ی PID ساده بوده و فقط خوروجی قابل اندازگیری سیگنال ها مورد نیاز است.
طراحی تنظیم کننده ی خودکار سیستم تثبیت قدرتی PID
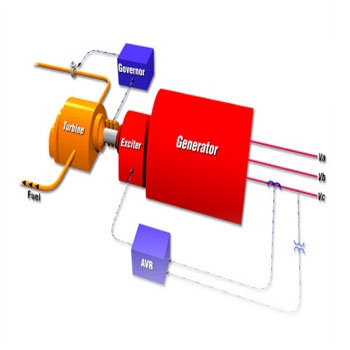
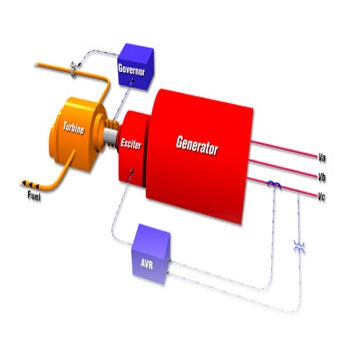
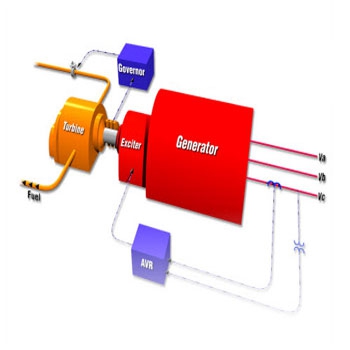
باتوجه به مشکلات انتقال داده ها از واحد های مولد که در مناطق پراکنده ای قرار دارند،این یک تمرین مشترک برای طاحی کنترل های غیر متمرکز در طراحی سیستم های تثبیت قدرتی برای سیستم های چند ماشینه ی قدرتی .تا انجا که به یک واحد مولد منحصر به فرد مربوط می شود شرایط عملیاتی سیستم ورودی و فعل و انفعالات بین مولد مورد مطالعه و سایر واحد ها منحصرا بر روی سیگنال های محل ندازگیری ان واحد منعکس می شود . بنابراین دینامیک هر مولد می تواند به وسیله ی عملکرد انتقال شناخته شده در زمان واقعی توسط انازه گیری مداوم ورودی ها و خروجی های منطقه ای ان واحد توضیح داده شود. این عملکرد انتقال گرچه بر مبنای سیگنال های منطقه ای می باشد اما شامل اثر سایر ماشین ها بر روی سیستم قدرتی می شود . به عنوان دست اورد یک عمل جابجایی برای یک واحد خاص می تواند به عنوان اساس برای طراحی یک تثبیت کننده ی تنظیم خودکار مجهز بر روی ماشین مورد استفاده قرار گیرد .اصول اسای طراحی تنظیم کننده ی خودکار سیستم قدرتی PID در شکل 1 و در طح بسته ان به تصویر کشیده شده است، که یک مولد همگام i به همراه یک محرک استاتیکی مجهز به یک سیستم تثبیت قدرتی PID داری تنظیمات به دست امده ی KPi،KDi و KIi تنظیم شده با توجه به قانون سازگاری توضیح داده شده است با سرعت ادازه گیری انحرافات بر خط مولد به عنوان سیگنال ورودی از تثبیت کننده ی تطبیقی.
توجه:
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا استفاده فرمایید.
- لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش ترجمه تخصصی مقالات خود بر روی کلید زیر کلیک نمایید.
سفارش ترجمه مقاله







نقد و بررسیها
هنوز بررسیای ثبت نشده است.