توضیحات
عنوان فارسی: کنترل تطبیقی خروجی فیدبک عصبی سیستمهای غیر خطی نامعلوم با پسماند نامشخص
عنوان انگلیسی:
Adaptive Neural Output Feedback Control of Uncertain Nonlinear Systems With Unknown Hysteresis Using Disturbance Observer
چکیده
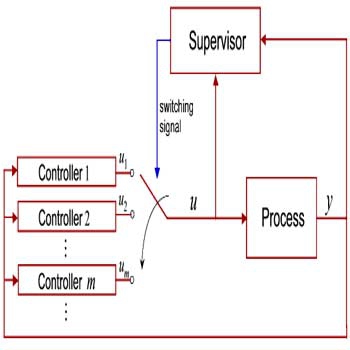
در این مقاله یک طرح کنترلی فیدبک خروجی عصبی تطبیقی برای سیستمهای غیرخطی نامعین ارائه شده است که در معرض پسماند ناشناخته، اغتشاشات بیرونی و حالتهای اندازهگیری نشده است. برای سر و کار داشتن با عبارت تابع غیرخطی در سیستم نامعین غیرخطی، قابلیت تقریب شبکهی عصبی تابع اساسی شعاعی به کار گرفته شده است. با استفاده از خروجی تقریبی رویتگر حالت و رویتگر اغتشاش غیرخطی بهترتیب برای ارزیابی حالتهای اندازهگیری نشده و اغتشاشات مرکب بهکار میروند. بر اساس ، گسترش داده شده و رویتگر حالت، یک کنترل فیدبک خروجی عصبی تطبیقی برای سیستمهای غیرخطی نامعین با روش بازگشت به عقب[1] ارائه شده است. مشتقگیر مدلغزشی مرتبه اول محاسبات تحلیلی خستهکننده و مشکل انفجار پیچیدگی در روش بازگشت به عقب سنتی، به کار گرفته شده است. پایداری سیستم حلقه بستهی کلی با دقت زیاد بهوسیلهی روش تحلیلی لیاپانوف انجام پذیرفته و عملکرد ردیابی رضایتبخش توسط تحت تاثیر پسماند ناشناختهی مجتمع، حالتهای اندازهگیری نشده و اغتشاشات بیرونی ناشناخته تضمین میشود. نتایج شبیهسازی یک مثال برای نشاندادن موثر بودن طرح کنترلی فیدبک خروجی عصبی تطبیقی پیشنهادی برای سیستمهای غیرخطی نامعین، ارائه شده است.
واژههای کلیدی: سیستم غیرخطی نامعین، شبکهی عصبی، رویتگر حالت، رویتگر اغتشاش، کنترل ردیابی خروجی
مقدمه
معمولاً پسماند به عنوان یکی از مهمترین غیرخطیگریهای ناهموار ورودی بهصورت گسترده در بسیاری از سیستمهای عملی وجود دارد و مسئلهی کنترل مقاوم توجهات بسیاری را به خود منعطف کرده است ]1[ و ]2[. علیالخصوص، وجود پسماند نامعین منجر به طراحی کنترل مقاوم پیچیدهتر برای سیستم غیرخطی نامعین میشود، که در طول دهههای اخیر به یک مسئلهی چالشبرانگیز در جامعهی کنترلی تبدیل شده است. برای برخورد موثرتر با پسماند ناشناخته، طرحهای کنترل تطبیقی گوناگونی برای سیستمهای غیرخطی گسترش یافته است. در ]3[ یک طرح کنترلی تطبیقی برای یک سیستم غیرخطی با فرض یک پسماند ناشناختهی واکنشی ارائه شده است. برای غیرخطیگری پسماند نامتقارن، مدلسازی و جبرانسازی متناظر آن برای محرکهای پیزوالکتریک با استفاده از مدل اصلاح شدهی پراندتل-ایشلینسکی در ]4[ ارئه شده است. در ]5[ برای سیستم چندورودی-چندخروجی نامعین غیرخطیبا پسماند نامعین یک طرح کنترلی فیدبک خروجی فازی تطبیقی گسترش داده شده است. برای یک سیستم بههم پیوسته با پسماند نامعین، یک کنترل تطبیقی غیرمتمرکز بر اساس روش بازگشت به عقب در ]6[ ارائه شده است. در برخی از مواقع حالات سیستم غیرخطی عملی ممکن است که غیرقابل اندازهگیری باشد. بعلاوه، تحقیقات ناچیزی در زمینهی سیستمهای غیرخطی که بهصورت همزمان از پسماند ناشناخته رنج میبرند، در دسترس است. بنابراین، طرح کنترلی مقاوم نیازمند پیشرفت بیشتر برای سیستمهای غیرخطی با حالتهای غیرقابل اندازهگیری، اغتشاشات نامعین و پسماند ناشناخته میباشد.
رویتگر حالت غیرخطی موضوعی مورد علاقه در جوامع آموزشی بوده و مسئلهی طراحی رویتگر غیرخطی سیستمهای نامعین توجهات بسیاری را در پژوهشهای اخیر به خود جلب کرده است ]7[–]9[. هرچند که بسیاری از نتایج تحقیقات برای سیستمهای خطی سودمند هستند ]10[. برای سیستمهای نامعین غیرخطی، طراحی رویتگر حالت بسیار پیچیده بوده و طرحهای کنترلی مقاوم بر اساس رویتگر حالت بایستی که پیشرفتهتر شوند ]11[–]14[. یک کنترلگر فازی تطبیقی بر اساس رویتگر حالت برای سیستمهای غیرخطی با ناحیهی مرده طراحی شده است ]14[. در ]15[ با استفاده از رویتگر حالت طراحی شده، یک طرح کنترلگر فازی تطبیقی برای سیستم غیرخطی نامعین طراحی شده است. طرح کنترل ردیابی فازی بر اساس رویتگر برای سیستمهای غیرخطی تصادفی در حضور نواحی مردهی ناشناخته در ]16[ گسترش داده شده است. از نتایج در دسترس در حیطهی رویتگر حالت سیستمهای غیرخطی، میدانیم که نامعینیهای سیستم، اغتشاشات بیرونی متغیر با زمان و پسماند ناشناخته بایستی که بیشتر مورد توجه قرار بگیرند.
توجه:
- برای دانلود فایل کامل ورد لطفا اقدام به خرید نمایید.
- پس از خرید بلافاصله لینک دانلود فایل برای شما ایمیل خواهد شد.





نقد و بررسیها
هنوز بررسیای ثبت نشده است.