
توضیحات
عنوان فارسی:
كالیبراسیون اتوماتیك با كنترل مناسب و قدرتمند یك سیستم مكاترونیك 6 درجه آزادی
عنوان انگلیسی مقاله ترجمه شده:
Automatic calibration with robust control of a six DoF mechatronic system
چكیده
این مقاله یك شیوه برای كنترل مناسب و قدرتمند را با همسانسازی و تركیب كالیبراسیون اتوماتیك جهت جبران تغییرات دینامیكی در سیستم مكاترونیك 6 درجه آزادی ارائه مینماید. كاربرد مورد استفادهای كه سودمندی رهیافت ارائه شده را به نمایش میگذارد، سیستم توپ و صفحه بر پایهی پلتفرم استیوارت میباشد. جهت ردیابی تغییرات دینامیك در سیستم، ما انواع مختلفی از توپها را با تغییر در جرم، قطر و سطح استفاده نمودیم. یك كالیبرایون اتوماتیك، جهت بدست آوردن مدلی بر پایهی نوع توپی كه بر روی صفحه قرار میگیرد، بكار گرفته شد. با استفاده از تكنیك تنظیم بر پایهی مدل، یك كنترلگر تفاضلی تناسبی (PD) براساس كالیبراسیون قبلی طراحی گردید. كنترلگر حاصل، برای مقاومت و قدرت عملكرد با تغییر توپ بدون تغییر پارامترهای كنترلگر مورد تست قرار گرفت. نتایج نشان میدهد كه ستاپ و مجموعه مورد نظر، قدرتمند و مناسب بوده و در حضور تغییرات مهم بخوبی رفتار مینماید.
مقدمه
سیستم توپ و صفحه یك نمونه ارزیابی روی سیستم ناپایدار حلقهباز است. این سیستم هر دو سلیقه و علائق علمی(تحقیقاتی) و تجاری را تحریك میكند؛ چرا كه كاربردهای واقعی و بالقوهی بیشماری برای آن وجود دارد. از نقطه نظر تئوری كنترل، حالت رقابتی كه این سیستم ارائه میدهد، آن را برای تست و توسعهی رهیافتهای جدید كنترل جذاب مینماید.
سیستم توپ و صفحه بر پایهی پلتفرم استیوارت، در سال 1965 توسط استیوارت توسعه یافته و منتشر شد [1]. از آن موقع، توجه حرفهایها و متخصصین مهندسی الكترومكانیك به آن جلب شد [2]. مزایای بازوهای مكانیكی موازی نسبت به انواع سری از آن و طراحی سادهی آْن، موجب شده تا پلتفرم استیوارت، راه حلی بسیار كاربردی و آزمایش شده گردد [6-3]. مزیت چنین سیستمهایی از نقطه نظر كنترل و دینامیك بطور گسترده در كار وُو [9-7] مورد تست و گزارش واقع شده است.
امروزه برخی نمونهها از كاربرد این سیستم را در وسایل نقلیه فضایی، هوانوردی، وسایل سرگرمی و حتی پزشكی میتوان یافت. مكانیزم داكینگ (اتصال مكانیكی) فضایی كه برای اتصال یك فضاپیما به ایستگاه فضایی بینالمللی مورد استفاده قرار میگیرد، بر پایهی پلتفرم استیوارت میباشد [7و8]. مكانیزم یاد شده، جهت جذب حركت نسبی فضاپیما طراحی میشود. در آموزش فضایی نیز یك كاربرد مرسوم بر پایهی پلتفرم استیوارت به فرم شبیهساز كامل پروازی نمود مییابد [9]. قابلیت این وسیله برای حركت و چرخش در شش درجهی آزادیاش در كنار قدرت و استحكام و نیرومندیاش، آن را نامزد بزرگتی برای این گونه كاربردها و وظایف میسازد. همچنین این سیستم، دقیقاً میتواند شتابهایی را كه سرنشینان یك وسیله هوایی در طول یك مانور هوایی درون آن وسیلهی تجربه میكنند و در معرض آن قرار میگیرند، باز تولید نماید. همچنین در پزشكی، فرم پلتفرم استیوارت برای جراحی دقیق مورد استفاده واقع میگردد [10 و 11]. جراحی یك عملیات بسیار دقیق و تخصصی بوده و گاهی در آن مجبور به حركاتی با مرتبهی چندصد میكرون میباشند. محدودیتهای تبهر و زبردستی انسانی كه در ذات او هستند، قید و محدودیتی برای پیشرفتهای جدید در این زمینه میباشند. در این مفهوم، رباتیك بسیار دقیق، برای كاربردهای پزشكی توسعه یافته و به كار گرفته میشود. با مشاهدهی چنین وسایلی، حصول ایده بر روی مهارت و از قابلیت تغییراتشان میسر و ممكن میگردد.
در این كاربردهای واقعی پلتفرم استیوارت، مشخصه سیستم ممكن است مورد تغییر واقع گردد (برای مثال، جرم ثابت پلتفرم در شبیهساز پرواز، با جاگیری آنها تغییر كند، یا با تغییر اینرسی وسیلههای فضاییای كه باید متصل گردند، وزن راهنماهای شبیهساز پرواز مورد تغییر قرار گیرد). اما بهرحال، كنترلكننده مجبور به حفظ و ثابت نگهداشتن عملكرد خود در حالت بهینه است؛ یعنی یك استراتژی كنترل مستحكم لازم بوده و تغییرات روی سیستم باید بطور اتوماتیك، تشخیص داده شود.
در این مقاله، ما یك فرآیند كاملاً اتوماتیك را ارائه مینماییم كه قادر به تشخیص تغییرات در پارامترهای سیستم توپ و صفحه جهت راهانداختن سیستم تشخیص خود و متعاقباً ایجاد بهینهسازی پارامتری برروی كنترلگر قدرتمند PD خواهد بود. كاركرد، با یكسانسازی دید بر پایه بازخوردی كه (فیدبكی كه) وابسته به شرایط تغییر نور محیطی است، انجام میپذیرد. تحت چنین شرایطی، تطابقها و تحریكها هر كجا كه لازم باشد، بور اتوماتیك انجام خواهد گرفت.قدرتمندی كنترلگر كه در طول تنظیم بر پایهی مدل بدست میآید، با مجموعهای از اندازهگیریها مورد تست واقع می شود كه در آن از انواع مختلف توپها با محدودهی وسیعی از وزنها، قطرها و سطوح مختلف استفاده میگردد.
ساختار این مقاله، بصورت ذیل است: بخش بعدی، تشریحی از سیستم توپ و صفحه را كه در این مطالعه از آن استفاده شده است، تشریح میكند. بخش 3، مرحلهی كالیبراسیون اتوماتیك را مورد بحث قرار میدهد. این مرحله، بر پایهی مدل ریاضیای میباشد كه در ابتدا توضیح داده شده و پس از آنكه كالیبراسیون اتوماتیك ارائه میگردد. بخش 4، فرآیند تنظیم بر پایه مدل را برای كنترگر PD ارائه میسازد. بخش 5، اندازهگیریها و نتایج متناظر را نمایش خواهد داد. همچنین یك نتیجهگیری در بخش 6 شكل گرفته و بیان میگردد.
تشریح سیستم
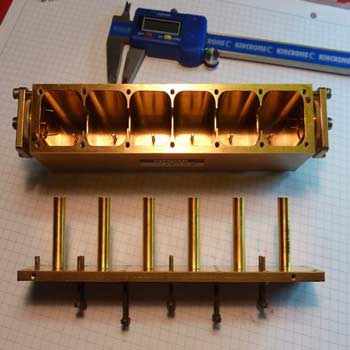
سیستم توپ و صفحه، درست شبیه همارز دوبعدیاش (یعنی سیستم توپ و تیر) یك سیستم ناپایدار حلقه باز است. این سیستم شامل چهار بخش اصلی میباشد: صفحه، توپ، سنسور فیدبك و واحد كنترل كامپیوتر. سیستم كامل را میتوان در شكل 1 مشاهده نمود.
صفحه توسط پلتفرم استیوارت ایجاد میگردد. سطح مدور آن (كه غالباً با لفظ پلتفرم یاد میشود) با قطر 575 میلیمتر، توسط یك فویل سیاه پوشیده میشود تا وضوح و دقت مشاهده را بین توپ و سطح بالا ببرد. صفحه، توسط شش سرووموتور زاویهای مورد عملیات حركتی واقع میگردد كه موقعیت و زاویه انحراف پلتفرم را با استفاده از اتصالات میلههای مقاوم و توپ مابین سرووموتور و صفحه تعیین مینمایند.موقعیتهای سرووموتورها توسط یك میكروكنترلگر كنترل میگردند كه این میكروكنترلگر، سیگنال ورودی-خروجیای را برای زاویهی مد نظر از سیستم دریافت میدارد.
پنج نوع توپ در این مقاله وجود دارد؛ یك توپ پینگپونگ و 4 توپ دیگر بصورتی كه شكل 2 نشان میدهد. مشخصههای آنها در جدول 1 نشان داده شده است. توجه كنید كه هر نوع از توپ، جرم و قطری متفاوت داشته و جهت تست استحكام و قدرت كنترلگر مورد استفاده قرار میگیرد.
یك دوربین قیمت پایین و كوچك نیز بعنوان سنسور، بالای پلتفرم مورد استفاده قرار گرفته تا موقعیت توپ را عكسبرداری نماید. دادههای این دوربین با كابل USB به كامپیوتر وصل میگردد.
توجه:
- برای دانلود فایل word کامل ترجمه از گزینه افزودن به سبد خرید بالا استفاده فرمایید.
- لینک دانلود فایل بلافاصله پس از خرید بصورت اتوماتیک برای شما ایمیل می گردد.
به منظور سفارش ترجمه تخصصی مقالات خود بر روی کلید زیر کلیک نمایید.
سفارش ترجمه مقاله






نقد و بررسیها
هنوز بررسیای ثبت نشده است.