




توضیحات
پروژه تابع مانع لیاپانوف مبتنی بر کنترل مدلغزشی برای تضمین عملکرد ردیابی بازوهای مکانیکی روبات با متلب
چکیده:
ما یک مکانیزم غیر متمرکز کنترل حالت لغزشی با خطای محدود پیشنهاد دادهایم که عملکرد ردیابی مجاز بازوهای مکانیکی ربات را تضمین میکند. دنبال کننده سطح لغزشی خطای تبدیل ساخته شده است و تابع لیاپانوف مانع (BLF) برای اطمینان از عملکرد حالت گذرا و پایدار در حوزه زمان تابع موقعیت بازوی مکانیکی ربات و همچنین برآورد خواص کنترلی حالت لغزشی استفاده شده است. توابع غیر خطی ناشناخته و خطاهای تقریب توسط شبکه RBF و جبران تطبیقی برآورد شده است. اثربخشی طرح کنترل پیشنهاد شده توسط مقایسه نتایج آزمایش با کنترل مرسوم مد لغزشی (SMC) و روش کنترل مد لغزشی زمان محدود ترمینال (FTSMC) بررسی شده است.
1- معرفی
فن آوری رباتیک به سرعت در حال توسعه در زمینه های صنعت پزشکی، به ویژه، در محدوده حرکات و نیروی رباتها میباشد. بسیاری از محققان محدودیت هندسی مانند محدودیتهای هولونومیک و غیر هولونومیک ربات تلفن همراه و روشهای کنترل آن را مطالعه کرده اند [1-4].
با این حال، محدود کردن حرکت یک ربات در حال کار در فضای آزاد، به دلیل اینکه یک روش سیستماتیک برای این مشکل ارائه نشده است، نسبتا دشوار میباشد. محدودیتهای حرکت در فضای آزاد از برخورد غیر منتظره بین ربات و محیط و سایر خطرات جلوگیری میکند. بسیاری از سیستمهای سنتی دارای یک کنترلر برای تضمین ثبات سیستم کنترلی در طول نامحدود از زمان میباشند. این کنترلر عملکرد مورد نظر را با آزمون و خطا بدست میآورد. اگر چه یک گین کنترلی همیشه برای هدفهای کنترلی خاصی تنظیم میشود، و با تغییر در خصوصیات طراحی نیاز به تنظیم مجدد گین کنترلی و یا طراحی دوباره کنترلر میباشد. بنابراین، به دست آوردن محدودیتهای سیستماتیک و عمومی عملکرد کنترلی از برنامه های کنترل معمولی مشکلتر میباشد.
برای تضمین عملکرد حوزه زمان، در مراحل طراحی بدون وابستگی به روش آزمون و خطا سه روش: کنترل بادگیر [5-7]، روش تبدیل [8-12]، روش تابع لیاپانوف (BLF) و روش محدودیت مراحل [13-16] پیشنهاد شده است. با این حال، این روشها نقصهایی دارند. کاربرد کنترل بادگیر [5-7] محدود به کلاس ? از سیستم های خطی یا غیر خطی با درجه نسبی 1 یا 2، با دینامیک پایدار صفر ، و با داشتن علامت گین فرکانسهای بالا میباشد. در روش انتقال خطا، مشکل تکینگی ممکن است با توجه به وجود یک تانژانت هیپربولیک در تابع، رخ دهد [8-12]. در شرایط خاص، یک سیگنال کنترلی اضافی می تواند عملکرد کنترلی را منحرف و یا حتی می تواند باعث مشکلات پایداری شود. بسیاری از کنترلهای محدودیتی بر اساس BLF [13-16] با استفاده از روش کنترل پسگام [17، 18] طراحی شدهاند. بنابراین، یک کنترل کننده پیچیده را می توان به نحوی طراحی نمود تا تغییرات مکرر از کنترل مجازی را اداره کند. بنابراین، در این مطالعه، کنترل مد لغزشی (SMC) با استفاده از یک سطح حالت لغزش خطا تبدیل شده، پیشنهاد شده است.
روش SMC یک کنترل غیر خطی قوی فراهم می کند، دلیل این امر آن است که دینامیکهای سیستم را با خواص ثابت مربوط به عدم قطعیت، پس از اینکه دینامیکهای سیستم در سطح مد لغزش کنترل می شود، اجرا میکند [19، 20]. در این مطالعه، ما با استفاده از روش SMC یک رویکرد با خطا محدود، به وسیله تعریف کردن یک دنبال کننده خطا سطح مد لغزش جدید و ترکیب آن با BLF پیشنهاد میدهیم. این روش عملکرد دنبال کنندههای قبلی را کامل میکند و همچنین ویژگیهای SMC را دارد. این روش می تواند کمبودهای تابعهای شناخته نشده غیر خطی در کنترل غیر متمرکز را با در نظر گرفتن تابع پایه شعاعی (RBF) شبکه برای فرآیند تقریب، را جبران کند [21]. با استفاده از این سطح مد لغزش، یک SMC قوی برای سیستم کنترل روباتیک بدون نیاز به اطلاعات در مورد دینامیک غیر خطی روبات را می توان طراحی کرد. کنترل کنندههای محدود به زمان ترمینال مدل لغزش [22، 23] به منظور به دست آوردن نتایج آزمایش و مقایسه با روش SMC، طراحی شدهاند، که پاسخ سریع تر از SMC معمولی را تضمین می کنند.
کنترل غیر متمرکز همراه با SMC [24،25] برای اجرای موثر یک کنترل مقیاس بزرگ و یا یک سیستم کنترل مدولار با پیکر بندی مجدد، ارائه شده است. چالش اصلی در استفاده از کنترل غیر متمرکز عدم قطعیتهای دینامیکی به علت ارتباطات متغیر با زمان و غیر خطی و دینامیکهای ناشناخته میباشد. در راه حل پیشنهادی ما، SMC غیر متمرکز می تواند به طور موثر با برآورد RBF با استفاده از کنترل های محدود بر اساس BLF-ساخته شود.
مزایای اصلی روش پیشنهادی ما نسبت به روش های مرسوم عبارتند از: (1) روش عملکرد ارائه شده بر خلاف روش های قبلی به کلاس سیستم محدود نیست، [5-7]. (2) از یک روش پیچیده تبدیل استفاده نمی کند، در نتیجه از مشکلات تکینگی اجتناب میشود [8-12]. و (3) کنترل دارای شرایط محدودیت انعطاف پذیرتری میباشد. روش کنترل پیشنهادی برای محدود کردن حرکت یک ربات در فضای آزاد، تحت شرایط عدم قطعیت در موقعیت ربات به طور موفقیت به کار گرفته شد…
توضیحات شبیه سازی:
در این پروژه 7 فایل متلب قرار داردکه به شرح زیر میباشند:
- فایل m سیستم رابطه 40 را به صورت s-function پیادهسازی میکند.
- فایل m سیگنالهای مرجع را مطابق با صفحه 6 مقاله با s-function تولید میکند.
- فایل سیمولینک mdl سیستم کنترل مد لغزشی رابطه 20 را پیادهسازی میکند.
- فایل سیمولینک mdl سیستم کنترل مد لغزشی مبتنی بر توابع لیاپانوف Barrier را مطابق با روابط 27 تا 29 پیادهسازی میکند.
- فایل m کنترل کننده مد لغزشی را به صورت s-function پیادهسازی میکند.
- فایل m کنترل کننده مد لغزشی مبتنی بر توابع لیاپانوف Barrier را به صورت s-function را پیاده سازی می کند.
مقاله دارای نکاتی به شرح زیر میباشد:
- پارامترهایی که در پایین صفحه 6 مقاله آورده شده اند در هیچ کنترل کنندهای استفاده نشده اند. اگر روابط 20, 27 تا 29 را بررسی کنید پارامترهایی در این روابط وجود دارند که در هیچ جای مقاله آورده نشدهاند. بنابراین پارامترها به صورت اختیاری انتخاب شده اند.
- در مقاله ذکر شده است که عبارت توسط شبکه عصبی تخمین زده شده است اما هیچ توضیحی در مورد اینکه چگونه و با چه پارامترهایی این کار انجام شده است داده نشده است, بنابراین از مقدار دقیق استفاده شده و بنابراین تخمین گر رابطه 28 پیاده سازی نشده است.
- نتایج بدست آمده بسیار به مقاله نزدیک هستند و تفاوت های جزئی ناشی از این است که پارامترهای کنترل کننده ها به صورت اختیاری انتخاب شده است.
- در رابطه 40 و در پارامترهای مشخص نیستند و بنابراین در شبیه سازی لحاظ نشده اند.
- سیگنالهای کنترلی بدست آمده دارای بایاس هستند اما از لحاظ دامنه تغییرات مشابه مقاله هستند. به نظر می رسد مقاله تنها تغییرات سیگنالهای کنترلی را ترسیم نموده است.
در کل باید گفت که مقاله به درستی روابط و پارامترها را تشریح نکرده است. به هر حال با توجه به اطلاعاتی که در مقاله موجود بود شبیهسازی با پارامترهایی که در نظر گرفته شده انجام شده است و نتایجی مشابه مقاله به دست آمده است. هر آنچه در مقاله به درستی تشریح نشده قابل شبیه سازی نیست چرا که برای شبیه سازی باید تمامی روابط به همراه تمامی پارامترها مشخص باشد که در مقاله شما نواقصی وجود دارد. جهت اجرای شبیهسازی و بدست آوردن نتایج مقاله ابتدا آدرس current folder را روی پوشه ای که فایل های شبیه سازی در آن قرار دارد تنظیم کرده و فایل main.m را اجرا کنید تا نتایج مقاله ترسیم شوند.
تصاویر شبیه سازی:
فایل سیمولینک SMC.mdl
در این فایل سیمولینک سیستم کنترل مد لغزشی معمولی پیاده سازی شده است. نمای این فایل در شکل زیر نشان داده شده است.

فایل سیمولینک SMC.mdl
فایل سیمولینک BFSMC.mdl
در این فایل سیستم کنترل مد لغزشی مبتنی بر توابع لیاپانوف Barrier پیاده سازی شده است. نمای این فایل در شکل زیر نشان داده شده است.
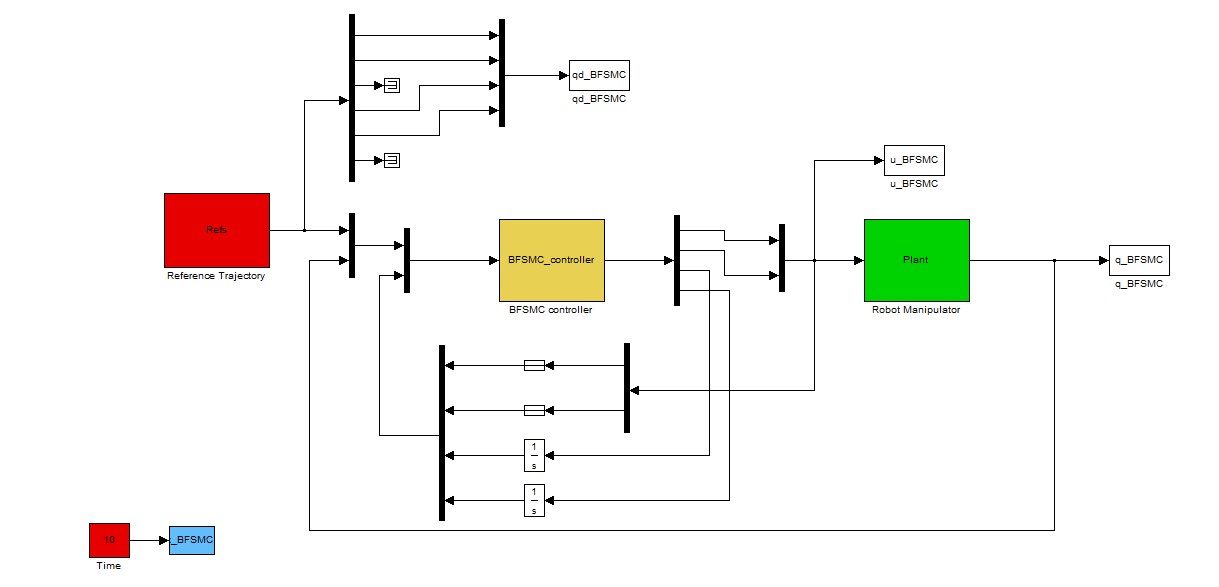
فایل سیمولینک BFSMC.mdl
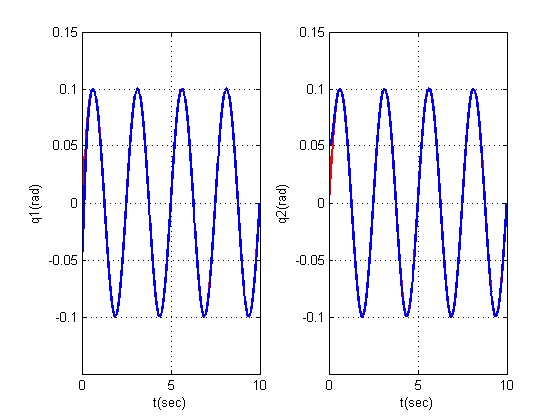
شکل 3 مقاله شبیه سازی شده
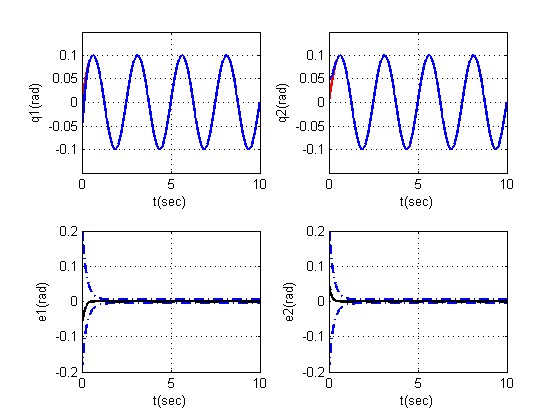
شکل 4 مقاله

سیگنال های کنترلی




نقد و بررسیها
هنوز بررسیای ثبت نشده است.