


توضیحات
پروژه شناسایی سیستم با دو روش RLS و IV با متلب
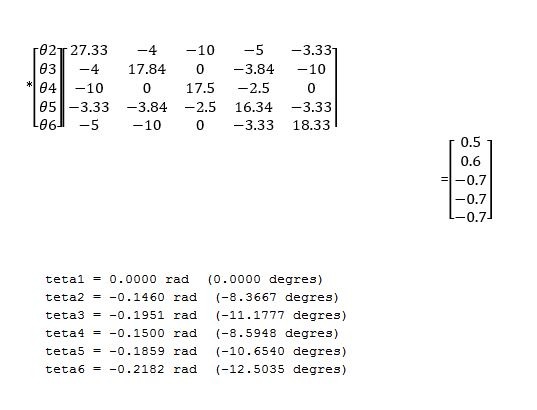
با توجه به ماتریسهای موجود و مقادیر واقعی teta ها تخمین زاویه های teta محاسبه شده و برای یافتن تخمین از روش حداقل مربعات بازگشتی(RLS) و متغییرهای کمکی (IV) استفاده شده است.
ماتریس های زیر:
1)
پروژه شناسایی سیستم با دو روش RLS و IV با متلب
2)
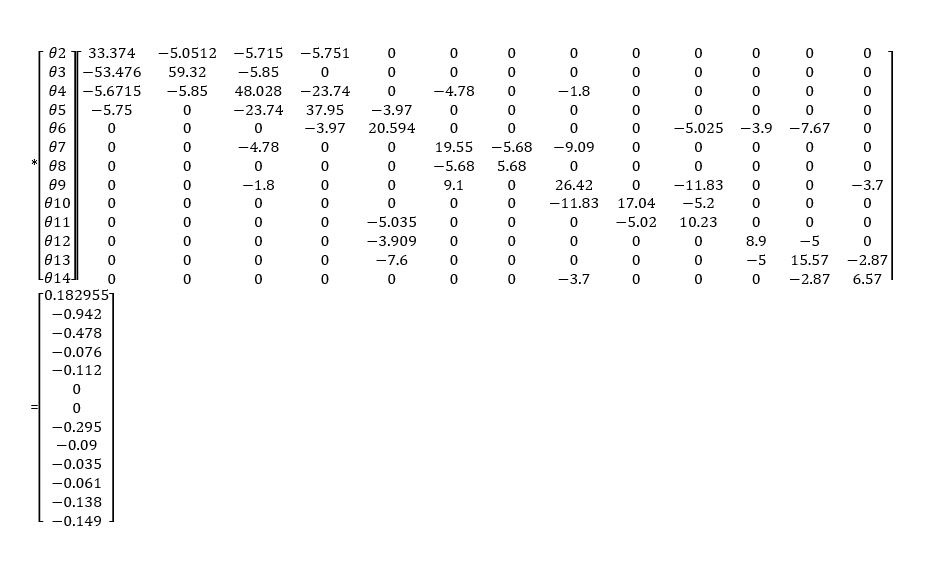
پروژه شناسایی سیستم با دو روش RLS و IV با متلب
مقادیر اولیه زاویه ها

پروژه شناسایی سیستم با دو روش RLS و IV با متلب
مقدمه:
روش های مختلفی وجود دارد که برای تخمین پارامترهای مجهول با توجه به مقادیر ضرایب و مقدار خروجی آن ها. که این مقادیر معمولا به صورت معادلات ماتریسی قابل بیان است. از طرفی همانطور که مشخص است برای حل یک معادله با n مجهول حداقل به n معادله مستقل نیاز است، که به جواب صحیح برسیم.
چنانچه تعداد معادلات مستقل کمتر از n باشد سیستم توانایی تشخیص مقدار صحیح پارامترها را ندارد. و اگر از بیشتر از n باشند، سیستم جواب ندارد، و در مسئله شناسایی پارامترهایی را تخمین می زنیم که کمترین خطای ممکن را با توجه به معیار خطا برای ما بدست آورند. که یکی از مهمترین روش ها کم کردن خطای شناسایی با معیار مربعات خطا LS می باشد.
در روش های تخمین یک مسئله بسیار مهم این است که بتوان حجم محاسبات را در تعداد معادله بالا کم کرد، به همین دلیل روش های تکراری بسیار با اهمیت هستند. لذا در مسئله شناسایی از فرم تکراری LS تحت عنوان RLS استفاده می شود. که در این روش با استفاده از یک حدس اولیه و ماتریس های خطای مناسب تلاش می کنیم که در هر مرحله با توجه به خطای مرحله قبل و مقادیر جدید معادلات یک حدس مناسب تر برای تخمین پارامترها بدست بیاوریم.
برای تخمین پارامترها از روش متغیرهای کمکی نیز استفاده می شود، در این روش یک متغیر کمکی که یک تابع خطی از معادلات سیستم می باشد، استفاده می شود و سپس با استفاده از این متغیرهای کمکی و متغیرهای اصلی و همچنین مقادیر خروجی به حل مسئله می پردازیم.
گزارش کد نویسی:
برای کد نویسی دو روش فوق ابتدا باید معادلات سیستم را به صورت مناسب و در قالب ماتریس بازنویسی کرد.
Gamma = [27.33 -4 -10 -5 -3.33;…
-4 17.84 0 -3.84 -10;…
-10 0 17.5 -2.5 0;…
-3.33 -3.84 -2.5 16.34 -3.33;…
-5 -10 0 -3.33 18.33];
Z = [0.5;0.6;-0.7;-0.7;-0.7];
که در بالا مقادیر ورودی و خروجی تعریف شده اند.
.



امیر –
با سیستم مرتبه چند حا شده این شبیه سازی