توضیحات
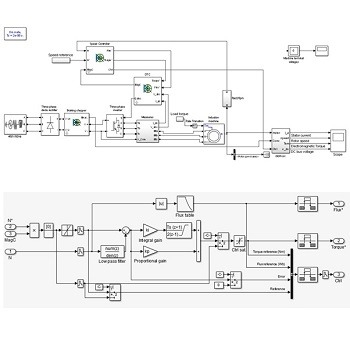
شبیه سازی مقاله کنترل مستقیم گشتاور در موتور القایی با متلب
چکیده مقاله:
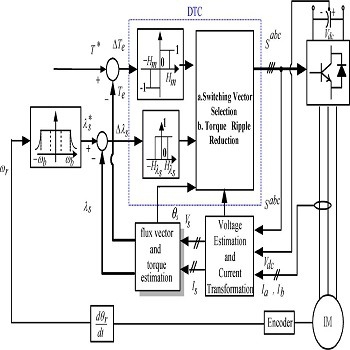
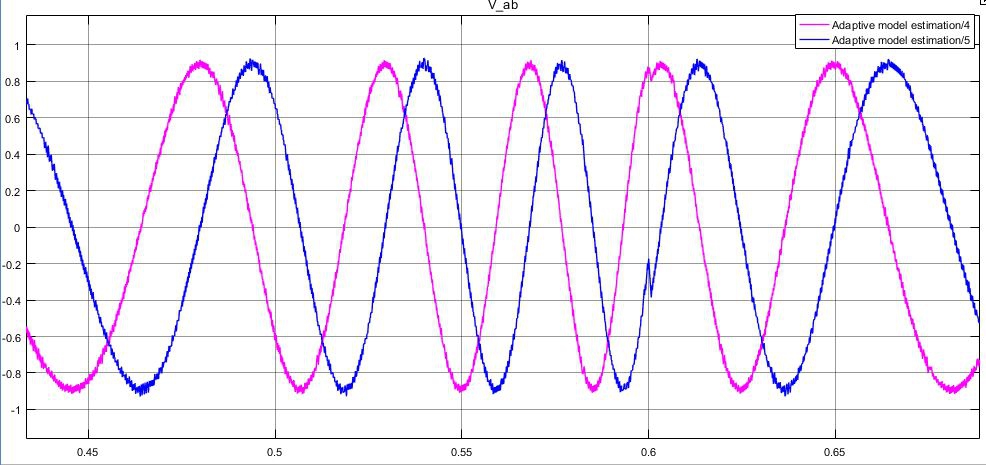
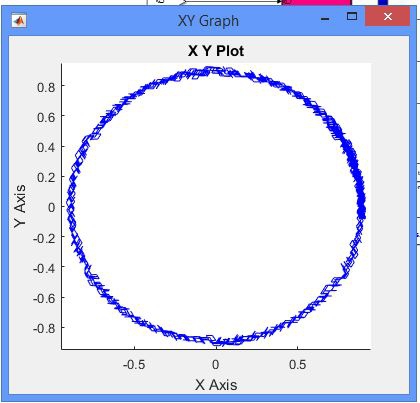
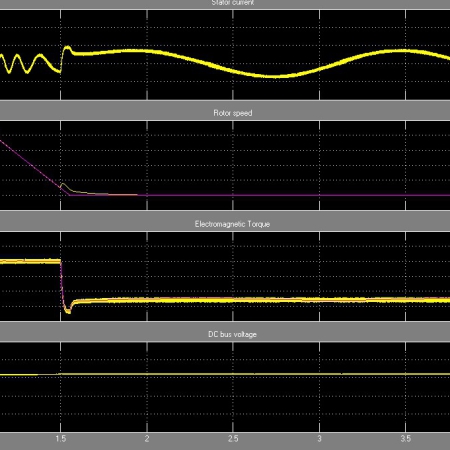
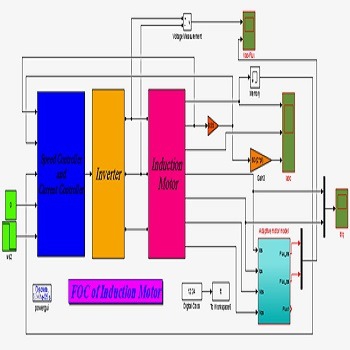
این مقاله یک روش ساده اما موثر برای کاهش موج گشتاور برای کنترل مستقیم گشتاور (DTC) موتورهای القایی را پیشنهاد می کند. DTC پیشنهاد شده موج جدیدی از گشتاور حداقل را فراهم می کند که معیارهای ریشه (rms) رشته گشتاور را رعایت می کند. چنین حداقل گشتاور جهانی DTC رشته قبل از مشتق شده است. حداقل DTC رشته گشتاور جهانی پیشنهاد یک طراحی دو مرحله ای است. اولین گام، در پایان دوره کنترل، خطای گشتاور را صفر می کند. سپس، مرحله دوم، تغییر تعادلی گشتاور و موج رسیده را با اصلاح الگوهای تعویض نامتقارن بردارهای ولتاژ اعمال مرحله اول به تقارن، کاهش می دهد. تجزیه و تحلیل تئوری ارائه شده است تا نشان دهد که راندمان گشتاور DTC پیشنهاد شده، یک حداقل رسیده است. علاوه بر این، برای اثربخشی این مطالعه، یک موتور درایو DTC مبتنی بر DSP ساخته شده است. شبیه سازی و نتایج تجربی حاکی از آن است که عملکرد رله گشتاور بهبود یافته است.
شبیه سازی مقاله کنترل مستقیم گشتاور در موتور القایی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایلهای پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.