





توضیحات
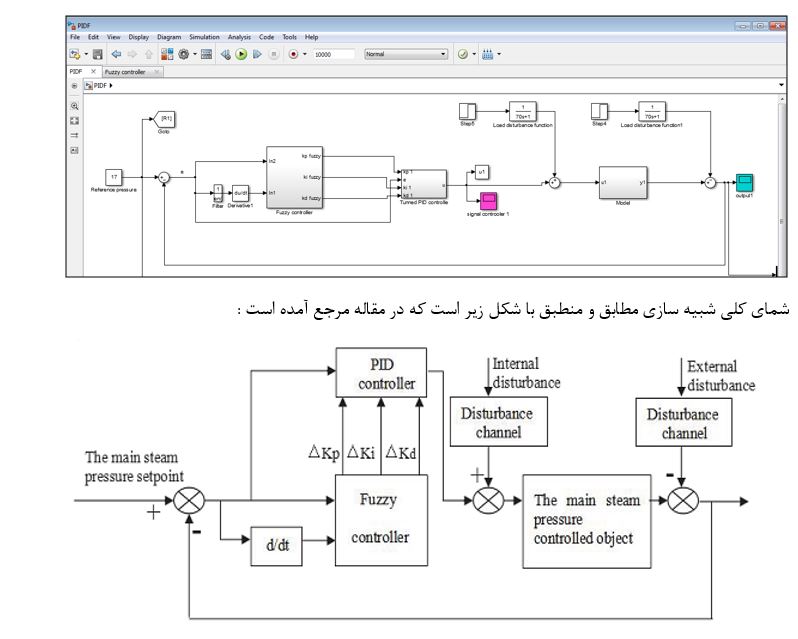
شبیه سازی مقاله سیستم احتراق دیگ بخار 300 مگاوات بر اساس کنترل فازی با متلب
برای طراحی کنترل کننده های تناسبی، مشتق گیر و انتگرال گیر فازی دو روش متداول وجود دارد، در طراحی اول کنترل کننده مستقیما براساس منطق فازی و به گونه ای که پورتره ی خطای سیستم را به سمت صفر ببرد، طراحی می شود ولی در روش دوم ضرایب کنترل کننده تناسبی، مشتق گیر و انتگرال گیر به صورت فازی بدست می آیند.
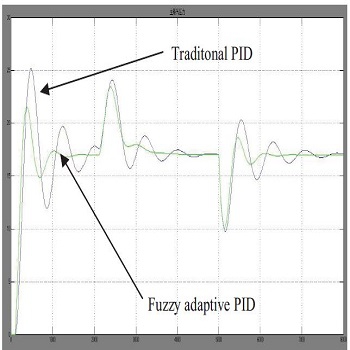
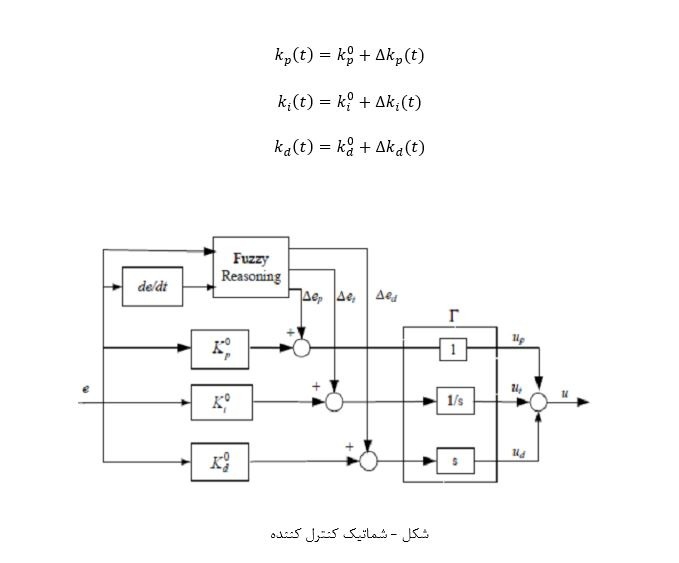
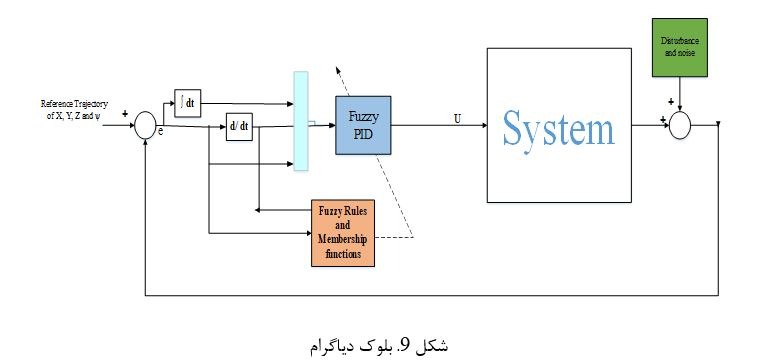
در واقع در این مقاله تئوری کنترل خود تنظیم با کنترل سنتی PID ترکیب می شود و نتایج آن هم قابل قبول می باشد و با تغییر بازه های توابع عضویت و خروجی، جواب را می توان بهبود نیز داد. شماتیک کنترل کننده طراحی به شکل زیر در می آید:
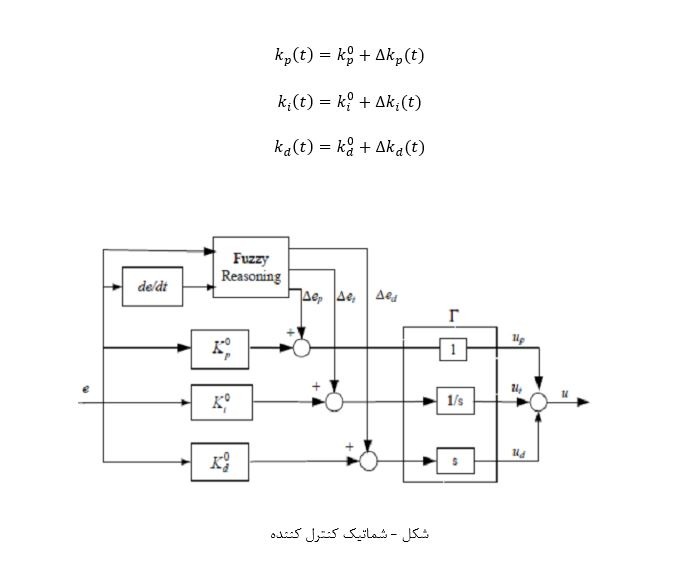
در اینجا بهره های کنترل کننده توسط متغیرهای زبانی، توابع عضویت، منطق فازی و مجموعه ی قوانین آن به شکل زیر تعریف می شوند، بدین ترتیب بهر ه های کنترل کننده براساس استدلال فازی مقدار دهی می شوند: سفارش پروژه متلب
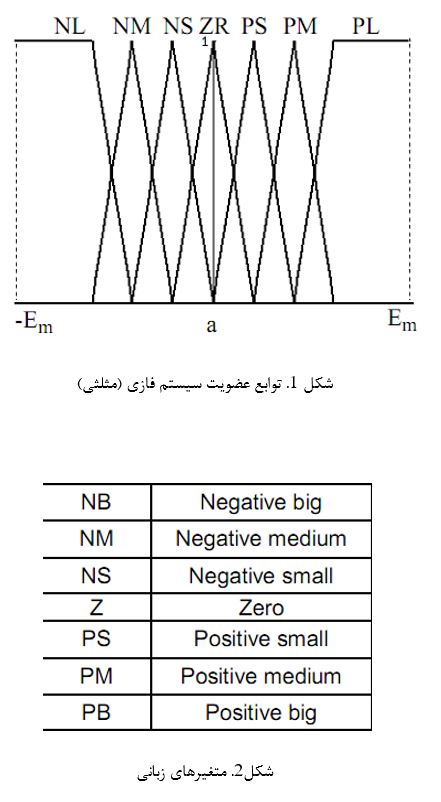
Table 1
Rules of fuzzy tuning
|
|
|
|
|
|
|
|
|
|
|
|
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
|
NB |
PB |
PB |
PM |
PM |
PS |
PS |
Z |
|
|
|
NM |
PB |
PB |
PM |
PM |
PS |
Z |
Z |
|
|
NS |
PM |
PM |
PM |
PS |
Z |
NS |
NM |
|
|
Z |
PM |
PS |
PS |
Z |
NS |
NM |
NM |
|
|
PS |
PS |
PS |
Z |
NS |
NS |
NM |
NM |
|
|
PM |
Z |
Z |
NS |
NM |
NM |
NM |
NB |
|
|
PB |
Z |
NS |
NS |
NM |
NM |
NB |
NB |
Table 2
Rules of fuzzy tuning
|
|
|
|
|
|
|
|
|
|
|
|
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
|
NB |
NB |
NB |
NB |
NM |
NM |
Z |
Z |
|
|
|
NM |
NB |
NB |
NM |
NM |
NS |
Z |
Z |
|
|
NS |
NM |
NM |
NS |
NS |
Z |
PS |
NM |
|
|
Z |
NM |
NS |
NS |
Z |
PS |
PS |
NM |
|
|
PS |
NS |
NS |
Z |
PS |
PS |
NM |
NM |
|
|
PM |
Z |
Z |
PS |
PM |
PM |
NM |
NB |
|
|
PB |
Z |
Z |
PS |
PM |
PB |
NB |
NB |
برای مقدار دهی پارامترهای کنترل کننده PID ، از سه قانون زیر استفاده شده است:
- اگر بزرگتر است، سپس باید بزرگتر و کوچکتر شود و در نتیجه سیستم پاسخ سریعی می دهد، قسمت انتگرال گیر باید محدود باشد (معمولا ) تا از بزرگ شدن فراجهش سیستم جلوگیری شود.
- اگر متوسط باشد، سپس باید کوچک تر باشد، مقدار برای داشتن فراجهش کوچک اهمیت بیشتری دارد.
- اگر کوچکتر است، سپس و باید بزرگتر باشند تا سیستم عملکرد بهتری در حالت ماندگار داشته باشد. زمانی که که کوچکتر است، باید بزرگتر باشد، . زمانی که که بزرگتر است، بایدکوچکتر باشد . به کمک این تغییرات می توان از نوسان حول نقطه تعادل جلوگیری کرد.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.