توضیحات
شبیه سازی آموزشی کنترل کننده CDM و کنترل فرکانس سیستم قدرت با الگوریتم بهینه سازی ملخ با متلب
چکیده مقاله (ترجمه ماشینی)
این مقاله یک تکنیک جدید کنترل فرکانس بار قوی (LFC) را بر اساس طراحی بهینه روش نمودار ضریب (CDM) در یک سیستم قدرت حرارتی سه منطقه مجهز به باتریهای جریان ردوکس (RFB) ارائه میکند. به منظور تاکید بر یک سیستم قدرت واقعی و به دست آوردن بینش دقیق، غیرخطی های مهم به دلیل محدودیت نرخ تولید (GRC)، باند مرده گاورنر (GDB) و تاخیر زمانی (TD) در نظر گرفته شد. نوآوری کنترلکننده پیشنهادی در این مقاله، استفاده از یک ترکیب هوشمند ترکیبی از یک تکنیک CDM غیرمتمرکز و بهینهسازی در سراسر معادلات جبری آن است. علاوه بر این، یک الگوریتم جدید به نام الگوریتم بهینهسازی ملخ (GOA) برای یافتن پارامترهای کلیدی کنترلکننده پیشنهادی در حل مسئله LFC برای اولین بار استفاده شد. علاوه بر این، این مطالعه یک تابع هدف اصلاح شده قدرتمند را با در نظر گرفتن معیارهای انتگرال مربع خطای ضربدر زمان (ITSE) برای هر دو سیگنال ورودی کنترل کننده (ACE)، برای به حداقل رساندن خطای کنترل منطقه و سیگنال خروجی (∆u) برای کاهش اندازه اعمال کرد. عملگر، زمان ته نشینی (Ts) برای داشتن پاسخ سریعتر و عملکردی برای افزایش حداقل نسبت میرایی (MDR) در بین تمام مقادیر ویژه. برای نشان دادن اثربخشی طرح پیشنهادی، سیستم قدرت شبیهسازی شده مورد مطالعه از طریق موارد مختلف از جمله یک پله بزرگ و اغتشاشات بار سینوسی و عدم قطعیت گسترده در پارامترهای دینامیکی یک سیستم قدرت غیرخطی آزمایش شد. نتایج مقایسه ای برتری روش CDM بهینه را نشان داده است، به ویژه زمانی که مجهز به RFB باشد. علاوه بر نتایج گرافیکی، با در نظر گرفتن MDR استراتژی های کنترل مختلف، ترجیح کنترل کننده پیشنهادی اعتبار بیشتری پیدا کرده است. این استراتژی جدید توسعهیافته منجر به یک کنترلکننده انعطافپذیر و دقیق با پشتیبانگیری ریاضی قدرتمند میشود که میتواند با موفقیت با غیرخطیهای GRC، GDB و TD در سیستمهای قدرت نامشخص آشفته مقابله کند و پاسخهای دینامیکی سریع، پایدار و قوی ارائه دهد. بنابراین، استراتژی کنترل پیشنهادی می تواند سازنده و با موفقیت در کاربرد سیستم قدرت جهان واقعی اعمال شود.
معرفی
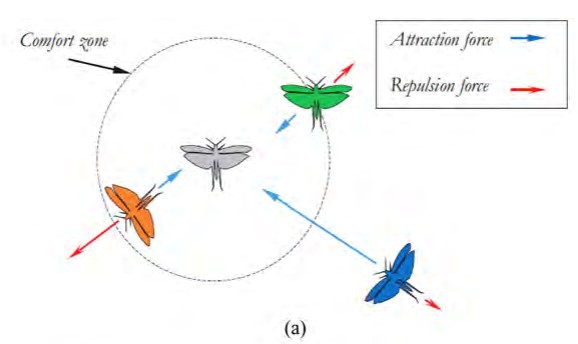
انرژی مورد نیاز برای جلب رضایت مداوم مصرف کنندگان، عدم از دست دادن ثبات، قابلیت اطمینان، امنیت و کیفیت قدرت. از این رو، یک سیستم کنترل برای لغو یا کاهش اثرات تغییرات در تقاضا و همچنین حفظ فرکانس در مقدار استاندارد آن ضروری است. کنترل فرکانس بار (LFC) با کنترل دریچه توربین ها، سیستم را حفظ می کند، فرکانس و جریان توان فعال بین مناطق را در مقادیر اسمی تعریف شده خود در طول شرایط آشفته به دلیل اختلالات بار و عدم قطعیت در عملکرد سیستم قدرت همگام می کند [1،2]. از سوی دیگر، با توجه به افزایش ابعاد سیستم های قدرت، تمایل بازارهای برق به رقابت با شرکت های مختلف تولید کننده وجود دارد. در نتیجه، اهمیت LFC بیشتر قابل توجه شده است. بنابراین، با در نظر گرفتن پیچیدگی و تنوع روزافزون در ساختار سیستمهای قدرت، استراتژیهای کنترلی جدید، قوی و آسان برای ارائه عملکرد مطلوب مورد نیاز است. در طول دهه گذشته، چندین استراتژی کنترل برای سنتز LFC توسعه یافته است. طراحان سیستم کنترل علاقه مند به یافتن راه حل های بهینه از طریق الگوریتم های هوشمند هستند. از آنجایی که کنترلکنندههای پارامتر ثابت مانند متعارف Proportional-Integral-Dirivative (PID) در نقاط عملیاتی اسمی خاصی طراحی شدهاند، نمیتوانند به درستی با عدم قطعیتها و آشفتگیهای بار کنار بیایند و ممکن است دیگر عملکرد خوبی در همه شرایط عملیاتی نداشته باشند. به همین دلیل، استراتژی های کنترل قوی و تطبیقی ارائه شده است. کنترلکنندههای منطق فازی بهینه [3-5]، سیستم رابط فازی عصبی تطبیقی (ANFIS) [5-7] و شبکههای عصبی مصنوعی (ANN) [5-9] به دلیل عملکرد بهتر آنها در مقایسه با سنتی در چندین مقاله استفاده شدهاند. PID با پارامترهای ثابت علاوه بر این تلاش ها، برخی از تکنیک های دیگر مانند کنترل کننده قوی مبتنی بر H2/H∞ [10]، مدل کنترل پیش بینی کننده (MPC) [11،12] و کنترل کننده حالت لغزشی (SMC) [13] در طراحی LFC استفاده شده است. از سیستم های قدرت این استراتژیها به وضوح منجر به پاسخهای دینامیکی بهتر در هنگام برخورد dij فاصله بین ith و jth ملخ در GOA D ضریب میرایی معادل Td مقدار تأخیر زمانی ∂ مقادیر نرخ سطح شیب دار GRC Ki بهره کنترل انتگرال منطقه i RFB ردوکس جریان باتری ΔPRFB توان خروجی انحراف باتری جریان ردوکس KpRFB بهره کنترل تناسبی RFB TdRFB ثابت زمان مبدل KrRFB بهره واحد RFB TrRFB ثابت زمانی واحد RFB CDM روش نمودار ضریب N(ها) شمارنده تابع انتقال نیروگاه حلقه باز D(ها) مخرج تابع انتقال از کارخانه حلقه باز A(s) مخرج رو به جلو چند جمله ای CDM B(s) چند جمله ای عددی بازخورد CDM F(s) چند جمله ای عددی مرجع CDM r ورودی مرجع تابعی برای تعریف قدرت نیروهای اجتماعی در GOA f شدت جاذبه در GOA l مقیاس طول جذاب در GOA g ثابت گرانشی در GOA به عنوان مثال بردار وحدت به سمت مرکز زمین در GOA u رانش ثابت در GOA ew بردار وحدت در جهت n از باد در GOA N تعداد ملخ در GOA ubd کران بالا در بعد Dth در GOA lbd کران پایین در بعد D در GOA Td مقدار بعد Dth در هدف در GOA (بهترین راه حل) c کاهش ضریب برای کوچک شدن منطقه راحتی، منطقه دافعه و منطقه جذب در GOA cmax حداکثر مقدار، ثابت های GOA cmin حداقل مقدار، ثابت های GOA L تکرار جریان در GOA Lmax حداکثر تعداد تکرار در GOA با غیرخطی ها، عدم قطعیت ها و اختلالات در مقایسه با کنترل کننده های کلاسیک. مشکلاتی مانند پاسخ گذرا، پارامترهای بهینه نامشخص یا محاسبات پیچیده برای به دست آوردن پارامترها و دشواری ساخت فیزیکی، همچنان مانعی برای اجرای واقعی آنها در صنعت است. بنابراین با در نظر گرفتن این مشکلات و افزایش پیچیدگی ساختار سیستم های قدرت، نیاز به تکنیک های هوشمند جدید برای ارائه عملکرد مطلوب است.
شبیه سازی آموزشی کنترل کننده CDM و کنترل فرکانس سیستم قدرت با الگوریتم بهینه سازی ملخ با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.