توضیحات
شبیه سازی آموزشی مکانیسم کنترل PID تنظیم خودکار جدید سیستم های غیر خطی با متلب
چکیده مقاله (ترجمه ماشینی)
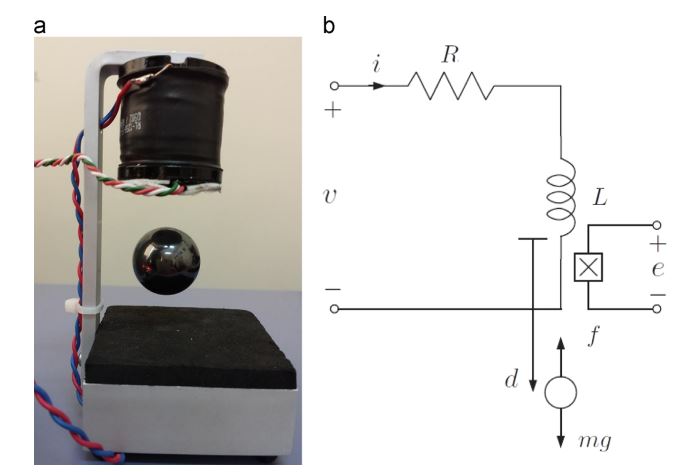
در این مقاله، یک کنترلکننده مشتق انتگرالی متناسب با تنظیم خودکار پیشبینیکننده مدل مبتنی بر گسستهسازی Runge-Kutta (RK-PID) برای کنترل سیستمهای غیرخطی زمان پیوسته معرفی شدهاست. پارامترهای کنترلکننده PID با استفاده از مدل RK سیستم از طریق کمینهسازی مربع خطای پیشبینی تنظیم میشوند که در آن اطلاعات پیشبینیشده خطای ردیابی تنظیم پیشرفتهتری از پارامترها را فراهم میکند. بر اساس رویکرد کنترل پیشبینی مدل (MPC)، مکانیسم پیشنهادی سازگاریهای پارامتر PID لازم را در حالی که شرایط تصحیح افزودنی را برای کمک به کنترلکننده PID اولیه ناکافی ایجاد میکند، فراهم میکند. کارایی مکانیسم پیشنهادی بر روی دو سیستم بلادرنگ آزمایشی آزمایش شده است: یک سیستم شناور مغناطیسی غیرخطی تک ورودی تک خروجی (SISO) و یک سیستم سطح مایع چند ورودی چند خروجی (MIMO) غیرخطی. RK-PID از نظر عملکرد کنترل، استحکام، پیچیدگی محاسباتی و موضوع طراحی با روشهای استاندارد PID، MPC غیرخطی استاندارد (NMPC)، RK-MPC و کنترل حالت لغزشی معمولی (SMC) مقایسه شده است. مکانیسم پیشنهادی عملکرد تنظیم و کنترل قابل قبولی را با خطاهای ردیابی حالت پایدار بسیار کوچک نشان میدهد و زمان تثبیت بسیار کوتاهی را برای همگرایی پارامترها فراهم میکند.
کلمات کلیدی: کنترل پیش بینی مبتنی بر مدل تنظیم خودکار کنترل کننده PID طراحی کنترل کننده MIMO PID کنترل زمان واقعی
معرفی
کنترلکنندههای PID معمولی به دلیل سادگی طراحی و کارایی در کاربردهای صنعتی و سیستمهای مکانیکی، در میان سایر کنترلکنندهها ترجیح داده شدهاند. مشکل اصلی در مورد یک کنترلر PID این واقعیت است که پارامترهای کنترل کننده باید به درستی تنظیم شوند تا عملکرد مورد نظر را برآورده کنند. برای این منظور، روشهای زیادی در ادبیات برای تنظیم پارامترهای
PID برای سیستمهای خطی زمانناوار (LTI) پیشنهاد شدهاند [1-4]. پارامترهای یک کنترلکننده PID باید تنظیم شوند تا ردیابی رضایتبخش سیگنال مرجع صاف سیستمهای متغیر زمانی خطی (LTV) را زمانی که سیگنال مرجع متغیر است، تنظیم کنند. از سوی دیگر، برای طراحی یک کنترل کننده PID برای سیستم های غیر خطی، این پارامترها معمولاً برای نقاط محلی با استفاده از روش خطی سازی تنظیم می شوند. خطیسازی عمدتاً برای همه سیستمهای غیرخطی به دلیل نقاط خطیسازی متفاوت و غیرخطی بودن بالا رضایتبخش نیست. علاوه بر این، ممکن است ساختار سیستم یا نقطه مرجع یا شرایط محیطی تغییر کند یا برخی اختلالات داخلی یا خارجی در حلقه کنترل دخیل باشد که باعث ایجاد نقاط خطی شدن مختلف می شود. همه این شرایط منجر به ضرورت یک ویژگی کنترل کننده PID می شود: سازگاری به معنای تنظیم خودکار. بنابراین بسیاری از کنترلکنندههای PID از جمله کنترلکننده PID تطبیقی حالت لغزشی (SM) برای سیستمهای نامشخص [5]، کنترلکننده PID تطبیقی مبتنی بر شبکه عصبی (NN) برای سیستمهای با دینامیک ناشناخته [6-9] و ماشین بردار پشتیبانی (SVM) کنترل کننده PID مبتنی بر [10] برای تنظیم پارامترهای PID در ادبیات پیشنهاد شده است. طرح کنترل تطبیقی می تواند به طور متناوب از یک کنترل کننده PID به صورت آبشاری با پیش بینی فازی استفاده شود [11]. همچنین، بسیاری از کنترلکنندههای PID جدید که برای سیستمهای الکترومکانیکی آزمایش شدهاند، در مقالات پیشنهاد شدهاند [12-17]. یکی دیگر از روش های کنترل محبوب، یعنی کنترل پیش بینی مدل (MPC) به عنوان تکنیک کنترل پیشرفته در ادبیات استفاده می شود. کنترلکنندههای مبتنی بر MPC به دلیل مزایایی که برای کنترل سیستم خطی/غیرخطی مانند مدیریت محدودیتهای ورودی و حالت، دقت و در دسترس بودن برای کنترل سیستمهای ناپایدار، غیر حداقل فاز و زمان مرده دارند، ترجیح داده میشوند [18-21]. پارامترهای طراحی، که توسط محدودیتهای سیستم تحمیل میشوند، باید به اندازه کافی بزرگ یا کوچک باشند تا از ثبات اسمی کنترلکنندههای مبتنی بر MPC اطمینان حاصل کنند [20]. در کنترل پیش بینی مدل محدود، سیستم باید از یک محدودیت به محدودیت دیگر حذف شود. این برای سازههای معمولی مانند PID یا جبرانکننده تاخیر بسیار دشوارتر از MPCها است. در حقیقت، کنترلکنندههای پیشبینی مدل ترکیبی در حل چنین مسائل کنترلی بسیار موفق بودهاند. برخی مطالعات مربوط به MPC های هیبریدی وجود دارد. به عنوان مثال، برای غلبه بر اختلالات تصادفی و تأخیرهای زمانی، یک کنترلر PID مدل داخلی مبتنی بر کنترل پیش بینی تعمیم یافته (GPC) در [22] توسعه یافت. پس از آن، یک کنترل کننده از نوع PID متفاوت که می تواند برای سیستم های هر مرتبه بر اساس GPC مورد استفاده قرار گیرد معرفی شد [23]. به عنوان یکی دیگر از کاربردهای MPC در کنترل کننده PID، پارامترهای PID با کمینه سازی تابع هدف بر اساس مدل CARIMA سیستم ها مطابق با [24،25] تنظیم می شوند. ژانگ و همکاران [26] یک کنترلکننده PID جدید بهینهسازی شده با چارچوب کنترل پیشبینی مدل فضای حالت غیر حداقلی برای تنظیم دما پیشنهاد کرد. در [26]، کنترل کننده پیشنهادی ساختار ساده PID و عملکرد کنترل خوب MPC را ترکیب کرده است. در [27] کیسر و همکاران. یک مکانیسم کنترل خود تطبیقی پیشبینی توسعهیافته غیرخطی (NEPSAC) پیشنهاد کرد که از مدل غیرخطی برای پیشبینی استفاده کرده است. سایر روش های کنترل پیش بینی مانند مدل پیش بینی فازی با MPC نیز توسعه یافته است [28]. در مدل پیشبینی فازی، از کنترل فازی برای کنترل عدم قطعیت سیستمهای خطی/غیرخطی که
دینامیک آنها ناشناخته است استفاده میشود. در [29]، یک رویکرد کنترل پیشبینی، حالت و پارامتر پیشبینی مبتنی بر مدل RK پیشنهاد شده است که ما را برای ایجاد یک مکانیسم تنظیم خودکار PID قوی، تطبیقی و پیشبینیکننده الهام بخشید. در این مقاله، یک مکانیسم PID تنظیم خودکار جدید در چارچوب RK-MPC برای سیستمهای غیرخطی پیشنهاد شده است. این مکانیزم برخی از ویژگی های برتر را از نظر عملکرد کنترل، استحکام و مسائل طراحی ارائه می دهد. به طور کلی، روش تنظیم خودکار PID پیشنهادی شامل سهویژگی مهم است: (1) استحکام از ساختار کنترل PID، (2) همگرایی سریع از چارچوب MPC، (iii) رفتار تطبیقی به دلیل انطباق مبتنی بر گرادیان، که تشکیل دهنده انگیزه اصلی مقاله علاوه بر معرفی یک روش جدید، ما دو آزمایش کنترل بلادرنگ را بر روی یک سیستم SISO (سیستم MagLev غیرخطی ناپایدار) و یک سیستم MIMO (سیستم سطح مایع سه مخزن غیرخطی) انجام دادهایم.
بخشی از فایل آموزشی
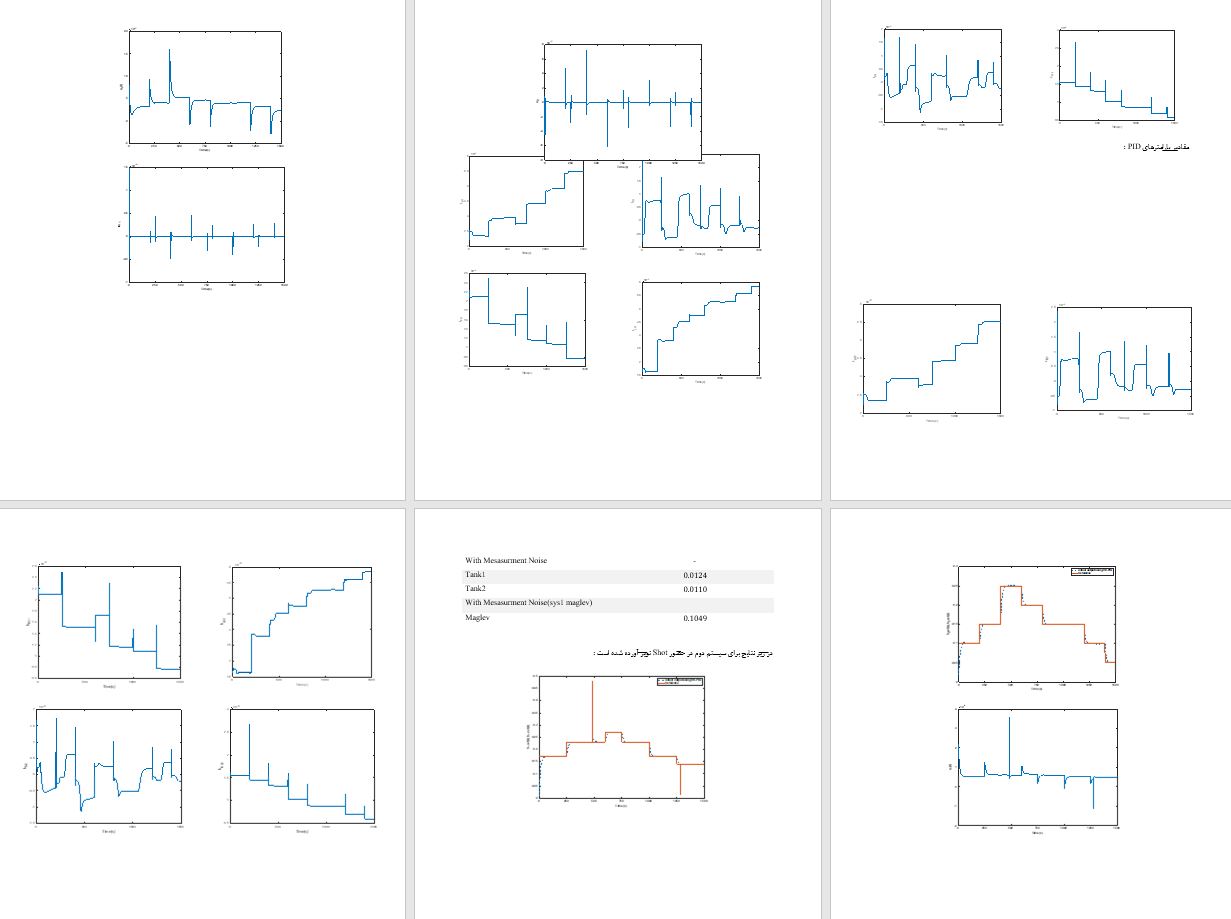
در این مقاله با استفاده از روش گسسته سازی Runge-kutta(RK) ضرایب کنترل کننده PID را به طور خودکار تنظیم میکند. ۳ مشخصه روش ارایه شده مقاوم بودن آن در مقایسه با ساختار PID ، همگرایی سریع و تطبیقی بودن آن میباشد. در این مقاله روش ارایه شده برای دو سیستم که یکی از آن ها SISO و دیگری MIMO است به صورت آزمایش بر روی سیستم واقعی و گرفتن نتایج از آن پیادهسازی شده است. در این جا با استفاده از مدل سیستم ها نتایج شبیه سازی بدست آمده است که همانطور میبینیم به نتایج عملی بسیار نزدیک است. در بعضی از موارد نیز به علت غیر دقیق بودن مدل نتایج متفاوت است اما همواره نتایج قابل قبول میباشند.
یک سیستم دینامیکی MIMO را میتوان با استفاده از معادلات حالت آن به صورت زیر در نظر گرفت:
که در آن بردار حالتهای سیستم ، بردار خروجیهای سیستم و بردار ورودیهای سیستم است.
به منظور طراحی یک سیستم خودکار تنظیم PID یک مدل غیرخطی با استفاده از روش RK مرتبه چهارم از سیستم پیوسته را بدست میآوریم. روش RK به صورت زیر است.
روش گسسته سازی RK :
برای یک سیستم غیرخطی پیوسته در زمان MIMO مانند (۱) حالت ها در لحظه n و ورودی ها در لحظه n ( که در آن نمایش داده میشوند.
حال در لحظه ی n+1 با استفاده از این روش حالتهای سیستم به صورت زیر بدست میآیند.
شبیه سازی آموزشی مکانیسم کنترل PID تنظیم خودکار جدید سیستم های غیر خطی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده است .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.